Come Risolvere Come Mettere In Pausa Il Riavvio Automatico Dopo I Problemi Di Installazione Di Windows?
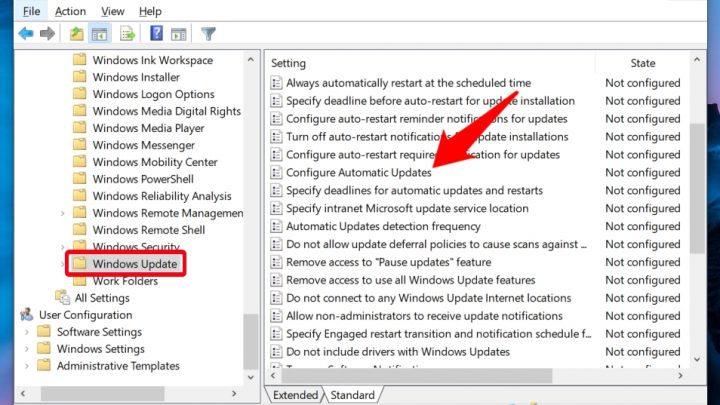
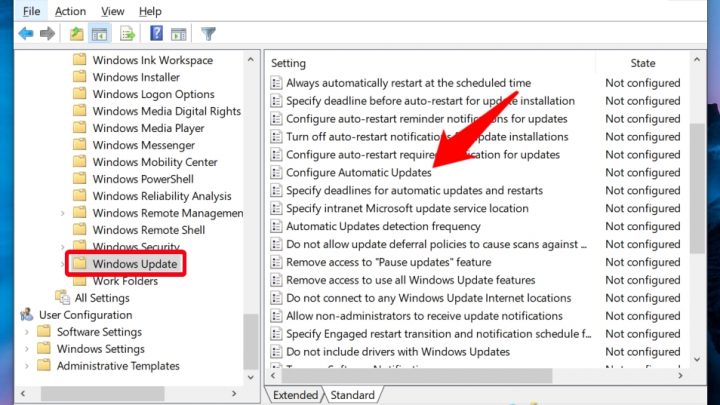
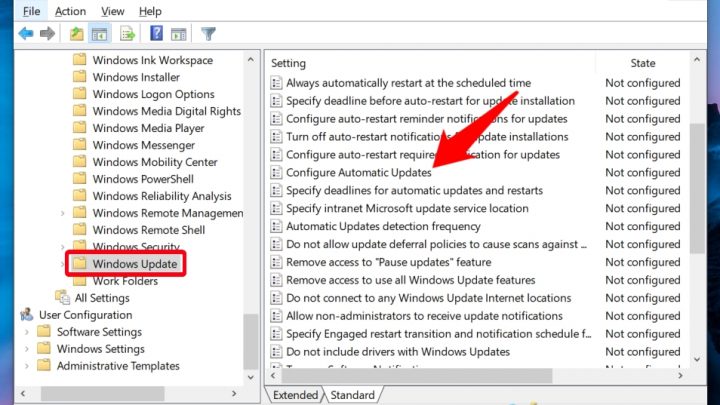
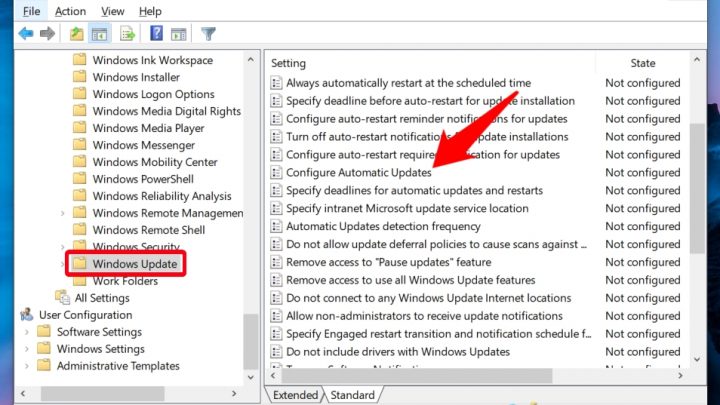
May 14, 2022La guida per l’utente di oggi mira a migliorare l’apprendimento di come nel mercato interrompere il riavvio automatico dopo un aggiornamento di Windows codice di errore. < /p> Attiva la polizza assicurativa aggiornamento base “No ripartenza automatica” Nella barra laterale, scegli Configurazione computer > Modelli…