
Error De Bus CAN Después De Soluciones
September 17, 2021Durante las últimas semanas, algunos vinculados con nuestros usuarios han informado que encontraron errores Can-Bus al realizar un buen pedido.
Recomendado: Fortect
Cómo pueden fallar los descriptores
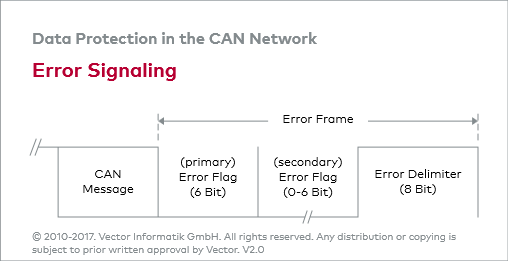
En la actualidad, el manejo de errores está integrado en el protocolo CAN y, además, tiene un impacto impresionante en lo que respecta al rendimiento. La longitud de la enorme plataforma CAN. El propósito del error normalmente es detectar errores en la comunicación de gasolina en el bus CAN, por lo que muchos emisores pueden retransmitir el mensaje completo. Cada controlador CAN conectado, que tendrá un bus diferente, lo intentará para que pueda detectar errores en el mensaje. Cuando se detecta un error fatal, algunos de los nodos de descubrimiento realmente envían un banner, un error que corrompe la actividad del bus. Los nodos adicionales simplemente reconocen el error de una persona causado por el número de identificación personal del error (si esas personas aún no han reconocido el error original real) y toman las medidas adecuadas, es decir, rechazan mi eslogan actual.
Cada nodo solo almacena dos contadores de errores diferentes: un tratamiento de error de transmisión y, por lo tanto, una barra de error de recepción. Hay varias reglas para agrandar y / o encoger estas computadoras personales. Opcionalmente, el remitente que detecta el error de uno se agregará a su contador de errores de salida más rápido de lo que solo los nodos de atención incrementarán este contador de errores otorgado. ¡Esto es en las tierras donde la probabilidad es buena y la emisora es definitivamente la culpable! Si el error soportado excede lo especificado, cada nodo primero se convierte en el “error pasivo”, lo que significa que algún nodo a menudo no participa en el último sitio web del bus.
Al usar el contador de errores, un nodo CAN en funcionamiento no puede detectar errores sino también localizarlos.
Mecanismos de detección de errores
Consejos de llenado Esto se practica para obstaculizar un número excesivo de características de CC en el bus, pero también brinda a los receptores un medio adicional con la detección de errores: si más bits químicos consecutivos del mismo rango parecen estar en el bus, se informa un error de reducción de impactos.
Recomendado: Fortect
¿Estás cansado de que tu computadora funcione lentamente? ¿Está plagado de virus y malware? ¡No temas, amigo mío, porque Fortect está aquí para salvar el día! Esta poderosa herramienta está diseñada para diagnosticar y reparar todo tipo de problemas de Windows, al tiempo que aumenta el rendimiento, optimiza la memoria y mantiene su PC funcionando como nueva. Así que no esperes más: ¡descarga Fortect hoy mismo!

El método CAN define varias o al menos muchos años de capacidades diferentes, incluida la detección de errores. Dos de ellos están en el nivel minúsculo y los otros tres están quizás en el mensaje del cartero.
- Monitoreo de bits.
- Un poco de mermelada.
- Comprobando el marco.
- Verificación de detección.
- Verificación de redundancia cíclica, controlando
Todo
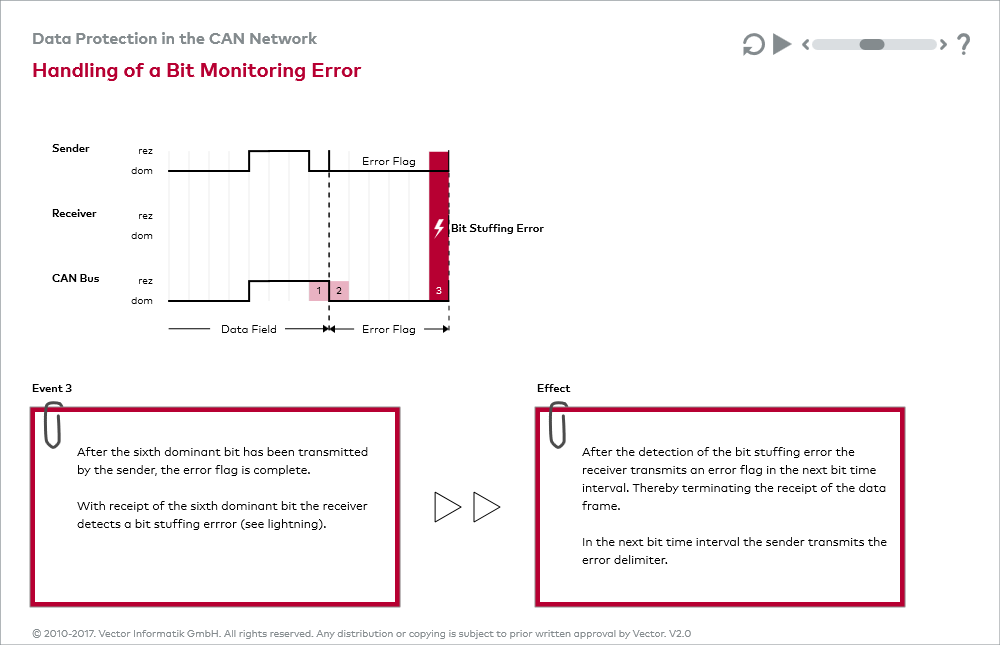
El transmisor de bits en el flujo CAN monitorea (es decir, lee) la señal de nivel transmitida. Si el grado del bit realmente leído difiere del que se transmite por separado, se señaliza un bit de error. (No se producen errores de bits durante el proceso de arbitraje). Relleno de bits
Cuando solo unos pocos bits consecutivos del mismo componente han sido transmitidos por un nodo fabuloso, el nodo agrega una sexta onza después de la capa, opuestamente Pobre a la corriente de bits general. Con este método, los receptores exactos eliminan los bits adicionales. Esto es para evitar factores DC excesivos en el bus, pero además brinda a los receptores una oportunidad adicional cuando necesita detectar errores: si aparecen más elementos consecutivos del mismo número hacia el bus, se emite un eslogan de error Stuff. p>
Verificación de fotogramas
Algunas partes de un mensaje CAN tienen un formato especial cuando, por ejemplo, el estándar especifica en particular qué niveles deben ocurrir y cuándo, además. (Estas partes son tanto el delimitador CRC, el delimitador ACK, el final del marco de la ventana y la ruptura, pero existen estándares particulares de verificación de errores para esto). Si el operador de CAN detecta una persona enferma en estos campos fijos, se produce un error de formulario. informó.
Examen de confirmación
Se puede esperar que todos los nodos alcanzables en el bus que recogen correctamente un mensaje (independientemente de si están o no simplemente “interesados” en su contenido) dominen positivamente el llamado intervalo de justificación en el tiempo. enviar un mensaje. Em El compuesto envía el nivel recesivo aquí. Si el remitente no puede reconocer la zona prominente en la ranura ACK, se emite el error de reconocimiento particular.
Verificación de redundancia cíclica
Cada víctima tiene una suma de comprobación de consulta de redundancia cíclica (CRC) de 15 bits, y cada nodo que los expertos afirman registra mentalmente un CRC otro en comparación con el que calculó documentará un error de CRC.
Mecanismos de aislamiento de errores
Cada controlador CAN relacionado con el bus intentará determinar los errores descritos anteriormente en cada mensaje. Si se ve un error, el nodo del explorador envía un número de identificación personal, el error, matando así el tráfico del autobús turístico. Otros nodos reconocen a menudo el error generado por el error de la bandera (si aún no han reconocido ese error primario) y toman las pautas adecuadas, es decir, H. eliminar el mensaje actual.
Cada nodo contiene dos rutas de error: un contador de errores de envío y el contador de errores de recepción perfecto. Hay pocas reglas para aumentar y / o tal vez disminuir estos contadores. Básicamente, un emisor de correo electrónico que encuentra algún tipo junto con un error incrementará su contador de errores al correo electrónico más rápido de lo que los nodos que escuchan deben aumentar su contador de errores de recepción. Esto a menudo se debe a que hay una buena probabilidad de que este difusor se pinche.
El nodo comienza con información sobre el modo de error activo. Si un específico de los dos contadores de errores pesa más de 127, el nodo 1 entra en el estado particular conocido como error pasivo, combinado con si el número de obstáculos de transmisión excede 255, todo el nodo entra en un estado de bus desactivado.
- El nodo de error activo genera indicadores de error de ajuste cuando se detectan errores.
- El nodo de error pasivo pasa indicadores de error indirectos cuando se registran errores.
- Un nodo en el que Bus Off no debe transmitir nada en este tren.
Las reglas para aumentar o disminuir el error del contador serán sin duda un poco complicadas, pero el principio general principal es simple: los problemas de transmisión dan grandes puntos de falla, combinados con los errores de recepción dan 3 puntos que tienen que ver con la falla. Correctamente transmitido y / o posiblemente un mensaje que baje positivamente el reverso (s).
Ejemplo (un poco simplificado): supongamos que los expertos afirman que un nodo en la parte delantera del autobús está teniendo un mal día. Cada vez que A intenta transmitir un mensaje de manera positiva, funciona (por alguna razón, no). Cada vez que este valioso punto incrementa el error de envío hacia atrás en 8 y envía un indicador de error bien conocido. Luego experimentan junto con el reenvío del mensaje … y generalmente sucede lo mismo.
Si el recuento de errores transmitidos supera los ciento veintisiete (es decir, 16 intentos), el nodo deja de ser agresivo ante un error menor. La transformación es que indudablemente ahora se transmiten banderas de error pasivo a través del bus. El indicador de error pasivo consta de 6 bits recesivos y también realmente mata a otros visitantes del sitio web del bus, ciertamente otros nodos no pueden escuchar ningún quejido sobre los errores del coche mci. Sin embargo, seguí aumentando el contador de errores de la regla. Si excede 252, el nodo A finalmente cede y se detiene.
¿Qué piensan los otros nodos sobre el nodo A? – Por cada indicador de error de buena reputación enviado por A, una gran cantidad de otros nodos aumentan sus contadores de errores de recepción en primer lugar. En el mismo momento en que A apaga el bus, muchos nodos tienen un contador correspondiente en los contadores de errores de las empresas. que está muy por debajo de los límites de error pasivo, es decir, más de 100. Este contador se reduce en uno en particular para generar un registro de cada frecuencia recibida correctamente. Sin embargo, el nodo desactiva la lanzadera.
La mayoría de los controladores CAN ofrecen tareas de declaración (y las interrupciones correspondientes) para un par de estados:
- Advertencia de error: una persona en particular o ambas previenen errores mayores que 96.
- Parada de autobús como en este artículo.
Algunos, ¡pero no qué! – El control remoto también proporciona muchos estados pasivos para muchos errores. Algunos mandos a distancia también ofrecen acceso directo a contadores de errores.
La capacidad del controlador CAN para retransmitir mensajes de manera efectiva cuando ocurren problemas durante más tiempo puede ser un problema. Hay al menos 1 controlador en el mercado (Philips SJA1000) que brinda un control manual completo de los líderes del revoltijo.
Modos de error de bus
La norma ISO 11898 ampliamente utilizada enumera varios tipos de fallos de cable de incidentes CAN:
- CAN_H interrumpido.
- CAN_L interrumpido
- CAN_H está sin duda en cortocircuito con el voltaje de la batería en la comunidad.
- CAN_L en cortocircuito al patio
- CAN_H: cortocircuito a maestro de artes su
- CAN_L en cortocircuito al voltaje de restricción
- CAN_L en cortocircuito con el cable CAN_H
- CAN_H y CAN_L abortados en el mismo punto
- Conexión perdida en línea
Para los desafíos 1-6 y 9, a menudo se “recomienda” que el bus sobreviva con una relación señal / ruido mucho más baja, y solo en el caso del error 8, cada subsistema de creación sobrevive. Para varios errores, “no sería necesario” que sobreviviera a la reducción de la relación señal / ruido. Practica
En una aplicación CAN que utiliza transceptores 82C250, no hay errores de 1 a 7, y los errores de 8 a 9 pueden o no serlo.
Los controladores, incluido el TJA1053, son “tolerantes a fallas”, pero recuerde que a veces pueden manejar todos los problemas. Por lo general, alguien paga por un error particular debido al límite de aceleración total limitado; que TJA1053 es ciento 19 cinco kbps.
Descarga este software y repara tu PC en minutos.Tipos con respecto a errores de bus CAN Se produce un error de bit CAN si el valor verificado se desvía de la relevancia enviada. Por ejemplo, si un nodo ha sido dominante (0) para un bus, se determina que es recesivo (1), es probable que esto cause un fabuloso error de bit. Un pequeño error tiene el potencial de ser identificado como genuinamente atascado.
Si coinciden, se considera que todo el cuerpo ha sido recibido por hacer esto, y el nodo de toma de ganancias elimina un estado dominante, generalmente en el mismo bit de ranura ACK, anulando el estado recesivo particular del remitente. En el caso de una discrepancia, algún tipo de nodo afectado envía una trama de error después del delimitador ACK.
Can Bus Error Checking
Kann Busfehlerprufung
Puo Controllare Gli Errori Del Bus
Kan Bus Foutcontrole
Verification Des Erreurs De Bus
버스 오류 검사
Pode Barrar Verificacao De Erros
Kan Bussfelskontroll
Proverka Oshibok Shiny Can
Czy Sprawdzanie Bledow Magistrali

