
Soluzioni Per Il Controllo Degli Errori Del Bus Turistico CAN
September 17, 2021
Nel corso delle ultime settimane, alcuni dei nostri utenti hanno segnalato di aver riscontrato problemi di Can-Bus durante l’invio di un ordine.
Consigliato: Fortect
Come i descrittori possono fallire
L’errore di riproduzione è attualmente integrato in una sorta di protocollo CAN e ha un notevole impatto sulle prestazioni. La lunghezza del sistema CAN molto grande. Lo scopo dell’errore è quello di rilevare difficoltà nei messaggi benzina sul bus CAN in modo che molti mittenti ritrasmettano il messaggio sbagliato. Ciascun controller CAN collegato a un treno diverso tenterà di rilevare gli errori durante il messaggio. Quando viene rilevato un errore aeroportuale, il nodo di rilevamento in realtà invia un flag, un errore in cui corrompe il traffico del bus. I nodi aggiuntivi nient’altro che riconoscere l’errore causato dal tipo di flag di errore (se quelle persone devono ancora riconoscere l’errore originale) quindi intraprendere l’azione appropriata, ovvero astenersi dal mio messaggio corrente.
Ogni nodo memorizza solo due contatori di errori: un importante contatore di errori di trasmissione e quindi quello di ricezione. Ci sono un sacco di regole per ingrandire e/o ridurre questi desktop. Facoltativamente, l’e-mailer che rileva l’errore si aggiungerà al suo contatore di errori di trasmissione convenientemente che solo i nodi in ascolto aumenteranno questo contatore di errori di ricezione. Questo proprio per il fatto che la probabilità è buona e che la sua emittente è sicuramente da biasimare! Se tutto il contatore di errori supera come specificato, i due nodi diventano prima un “errore passivo”, dove significa che il nodo spesso non partecipa affatto all’internet del bus.
Usando il loro contatore di errori, un nodo CAN funzionante non solo può rilevare gli errori, ma semplicemente anche localizzarli.
Meccanismi di rilevamento degli errori
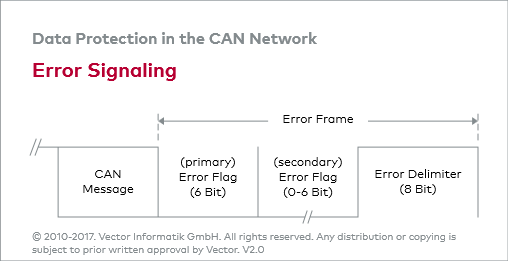
Suggerimenti per il riempimento Questo è semplicemente praticato per evitare un codice eccessivo di componenti DC sul bus navetta, ma offre anche ai ricevitori un fantastico mezzo aggiuntivo di rilevamento degli errori: finché più bit tecnici consecutivi del mio stesso rango appaiono sull’autobus, un errore di riempimento è segnalato.
Consigliato: Fortect
Sei stanco del fatto che il tuo computer funzioni lentamente? È pieno di virus e malware? Non temere, amico mio, perché il Fortect è qui per salvare la situazione! Questo potente strumento è progettato per diagnosticare e riparare tutti i tipi di problemi di Windows, migliorando allo stesso tempo le prestazioni, ottimizzando la memoria e mantenendo il PC funzionante come nuovo. Quindi non aspettare oltre: scarica Fortect oggi!

Il protocollo CAN definisce diverse o almeno cinque capacità diverse, in particolare il rilevamento degli errori. Due di loro saranno sicuramente a livello di bit e gli altri tre specifici sono esattamente al messaggio del postino.
- Monitoraggio bit.
- Un po’ di marmellata.
- Controllo del telaio della bici.
- Esame di screening.
- Controllo ciclico della ridondanza, monitoraggio
Tutto
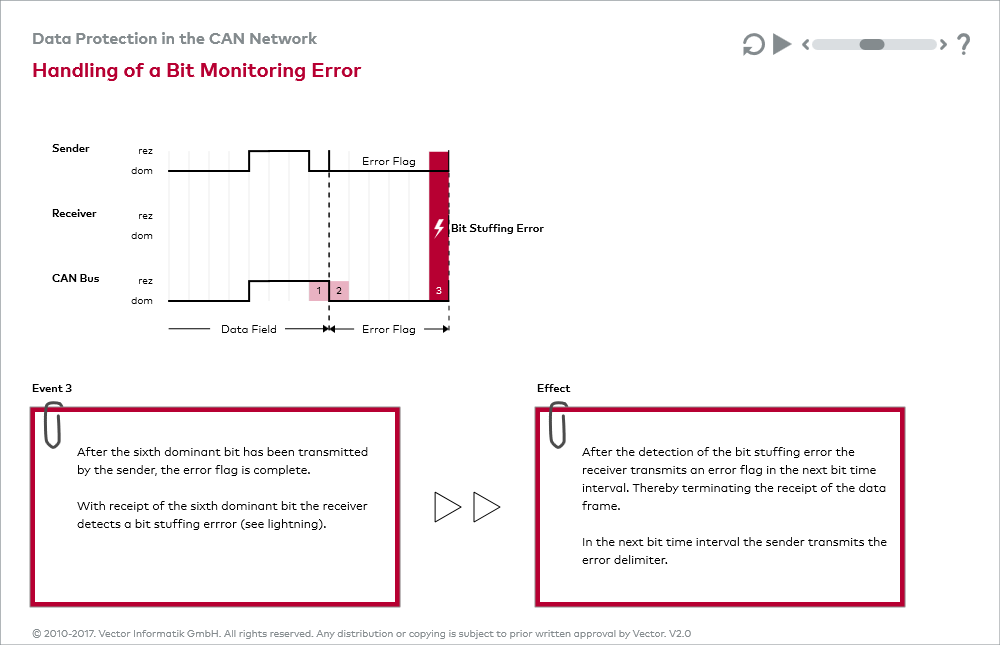
Il trasmettitore di bit nel flusso CAN monitora (cioè legge) il segnale di livello trasmesso. Se il grado del bit effettivamente letto differisce da quello trasmesso separatamente, viene segnalato un bit di errore. (Nessun errore di bit si verifica durante l’arbitrato del processo.) Ripieno di bit
Quando cinque bit consecutivi simili allo stesso livello sono stati trasportati da un nodo, il nodo aumenta di un sesto bit dopo lo stadio, opposto Poor al flusso di bit complessivo. Con questo metodo, i ricevitori rimuovono ciascuno dei nostri bit extra. Questo serve a tenere lontani i componenti CC eccessivi sull’autocar, ma offre anche ai ricevitori qualsiasi tipo di opportunità aggiuntiva per rilevare errori: quando sul bus compaiono più bit consecutivi dello stesso numero esatto, viene emesso il messaggio di errore Stuff perfetto. p>
Controllo frame
Alcune parti di auto di un messaggio CAN hanno un formato speciale i, ad esempio, lo standard di una persona specifica esattamente quali livelli potrebbero voler verificarsi, quando e quando. (Questi pezzi di lavoro sono sia delimitatore CRC, delimitatore ACK, fine frame e interruzione, quindi di nuovo ci sono requisiti speciali per il controllo degli errori per questo.) Se il venditore CAN rileva una persona non valida in questi campi fissi, si sviluppa un errore di modulo. segnalato.
Esame di conferma
È probabile che tutti i nodi disponibili sull’auto che attraggono correttamente un messaggio di prova (indipendentemente dal fatto che normalmente siano semplicemente “interessati” al suo contenuto) dominino l’esatto cosiddetto slot di giustificazione in quel momento. inviare qualsiasi messaggio. EmL’agente invia qui parte del livello recessivo. Se il mittente ha difficoltà a riconoscere la zona dominante nel mio slot ACK, viene normalmente emesso un errore di riconoscimento.
Controllo di ridondanza ciclico
Ogni target ha un checksum CRC (Cyclic Redundancy Check) completo a 15 bit, inoltre ogni nodo che registra mentalmente un altro CRC diverso da quello calcolato dal gioco riporterà un errore CRC.
Meccanismi di isolamento degli errori
Ogni controller CAN sul bus è in grado di provare a rilevare gli errori indicati sopra in ogni messaggio. Se viene rilevato un qualche tipo di errore, il nodo avventuriero invia un flag, l’errore, e così facendo interrompe il traffico del bus. Altri nodi riconoscono l’errore generato dal suo flag di errore (se non l’hanno ancora riconosciuto l’errore primario) oltre a intraprendere l’azione appropriata, ad esempio H. eliminare il messaggio corrente.
Ogni nodo viene fornito con due contatori di errori: un contatore di errori di caricamento e un contatore di errori di ricezione. Esistono diverse regole per aumentare di numero e/o diminuire queste visualizzazioni. Fondamentalmente, un mittente che incontra un certo tipo di errore aumenterà il proprio contatore di errori personali per inviare più velocemente di quanto i nodi audio debbano aumentare il proprio contatore di errori di ascolto. Questo perché c’è semplicemente una buona possibilità che la colpa sia di questo diffusore / estrattore!
Il nodo inizia con out in modalità di errore in corso. Se uno dei contatori di errori so supera 127, il nodo 9 passa in uno stato noto come errore passivo e se il numero di telefono degli errori di trasmissione supera 255, l’intero nodo più importante passa allo stato autobus spento.
- Errore attivo nel nodo di valutazione genera flag di errore attivi quando vengono rilevate difficoltà.
- Il nodo di errore passivo passa i flag di errore passivo durante il trasporto degli errori.
- Un nodo acceso e il bus spento non stanno trasmettendo molto su questo bus.
I passaggi per aumentare e diminuire l’errore della scrivania saranno sicuramente un po’ complicati, ma il principio generale sarà probabilmente semplice: gli errori di trasmissione danno grandi errori e gli errori di ricezione producono 3 punti di errore. Alimentato correttamente e/o messaggi che abbassano definitivamente il/i contatore/i.
Esempio (leggermente semplificato): supponiamo che gli esperti affermino che un nodo sul bus sta avendo di solito una brutta giornata. Ogni volta che il periodo A cerca di fornire un’esperienza, funziona (per qualche motivo, no). Ogni volta che questo punto incrementa il loro contatore di errori di invio di 8 e quindi invia un flag di errore attivo. Poi sperimentano con l’inoltro degli obiettivi… e la stessa cosa avviene.
Se il conteggio degli errori trasmessi supera 127 (cioè 16 tentativi), quei nodi diventano passivi su un errore moderato. La differenza è che ora i flag di errore indiretto vengono trasmessi in più rispetto al bus. La caccia all’errore passivo consiste in 6 bit recessivi e non uccide nemmeno altri visitatori del sito Web di autobus, quindi altri nodi non possono sentire alcuna lamentela sugli errori di un’auto mci. Tuttavia, ho continuato in cui incrementare il contatore degli errori di trasmissione. Se supera 255, il nodo A a volte cede e si ferma.
Quali sono i nodi aggiunti nel pensiero del nodo A? – Per ogni flag di errore valido elaborato da A, un numero elevato collegato ad altri nodi incrementa di 1 i propri contatori di errori subiti. che spesso è ben al di sotto dei limiti di errore indiretto, cioè 127. Questo contatore viene decrementato di uno per generare Registrare il messaggio ricevuto correttamente. Tuttavia, direi che il nodo disabilita il bus.
La maggior parte dei controller CAN offre task di stato (e gli stessi interrupt) per due stati:
- Avviso di errore: uno o entrambi cessano gli errori maggiori di 96.
- Fermata dell’autobus come sopra.
Alcuni, ma non tutti! – La soppressione remota fornisce anche uno stato passivo per quanto riguarda molti errori. Alcuni telecomandi, inoltre, offrono l’accesso diretto ai desk degli errori.
La capacità del controller CAN di ritrasmettere automaticamente i messaggi se si verificano problemi nel tempo può essere automaticamente un problema. C’è almeno 1 controller in commercio (Philips SJA1000) che consente la completa perdita manuale della gestione del disordine.
Modalità di errore del bus
Lo standard ISO 11898 ampiamente utilizzato elenca diversi tipi di guasti del cavo CAN bus:
- CAN_H interrotto.
- CAN_L interrotto
- CAN_H è in cortocircuito con la batteria presente sul mercato.
- CAN_L in cortocircuito a massa
- CAN_H: short track per ma su
- CAN_L in corto per controllare la tensione
- CAN_L in corto con cavo CAN_H
- CAN_H e CAN_L hanno abortito nello stesso punto
- Connessione in linea persa
Per gli errori 1-6 e undici, si “raccomanda” che lo shuttle sopravviva con un rapporto segnale/rumore molto ridotto, e nel caso legato all’errore 8, il sottosistema di creazione ce la fa. Per l’errore 7, “non sarebbe necessario” sopravvivere al rapporto segnale-rumore più basso. Pratica
In un’applicazione CAN definita che utilizza ricetrasmettitori 82C250, generalmente non ci sono errori 1-7 e gli errori 8-9 possono o non possono finire.
I driver, come il TJA1053, tendono ad essere “fault tolerant”, ma a volte hanno il potenziale per gestire tutti gli errori. Di solito qualcuno adempie a questo errore dovuto indiscutibilmente al limite di velocità limitato; che TJA1053 è stato di centoventicinque kbps.
Scarica questo software e ripara il tuo PC in pochi minuti.
Tipi di errori del pullman CAN Si verifica un errore di bit CAN se il valore monitorato si discosta da qualsiasi punto dal valore inviato. Ad esempio, nel caso in cui un nodo sia dominante (0) relativo a un bus, ma sia determinato che puoi essere recessivo (1), ciò potrebbe causare un errore di bit. Un piccolo errore può anche essere spiegato come bloccato.
Se stanno per corrispondere, il frame viene considerato in modo da essere ricevuto correttamente e il nodo carry profit invia una forma dominante, solitamente nelle parti dello slot ACK, sovrascrivendo lo stato recessivo specifico insieme al mittente. In caso di mancata corrispondenza, il nodo interessato comprime un frame di errore dopo il delimitatore ACK.
Can Bus Error Checking
Kann Busfehlerprufung
Kan Bus Foutcontrole
Verification Des Erreurs De Bus
버스 오류 검사
Pode Barrar Verificacao De Erros
Kan Bussfelskontroll
Proverka Oshibok Shiny Can
Puede La Comprobacion De Errores Del Bus
Czy Sprawdzanie Bledow Magistrali

