
CAN 버스 오류 통과 솔루션
September 17, 2021지난 몇 주 동안 사용자와 관련된 일부 사용자는 최상의 주문을 할 때 Can-Bus 오류가 발생했다고 보고했습니다.
권장: Fortect
<리>1. Fortect 다운로드 및 설치설명자가 실패할 수 있는 방법
오류 처리는 현재 CAN 프로토콜에 내장되어 있거나 성능에 인상적인 영향을 미칩니다. 거대한 CAN 소프트웨어 프로그램의 길이입니다. 오류의 목적은 CAN 버스의 가솔린 통신 오류를 감지하여 많은 발신자가 부적절한 메시지를 재전송할 수 있도록 하는 것입니다. 다른 버스에 직접 연결된 각 CAN 컨트롤러는 메시지의 오류를 실제로 감지하기 위해 시도합니다. 치명적인 오류가 감지되면 현재 검색 노드는 실제로 버스 클릭을 손상시키는 오류인 헌트를 보냅니다. 추가 노드는 단순히 오류 플래그로 인해 발생한 오류라고 말하고(그 사람들이 원래 오류의 일부를 이미 인식하지 못한 경우) 적절한 처리, 즉 현재 요점을 거부한다는 것을 인식합니다.
각 노드는 2단계 오류 카운터만 저장합니다: 전송 오류 키오스크 및 이에 따른 수신 오류 카운터 상단. 이러한 개인용 컴퓨터를 향상 및/또는 축소하기 위한 몇 가지 규칙이 있습니다. 선택적으로, 이러한 오류를 감지하는 발신자는 노드를 튜닝하는 경우에만 이 참조 오류 카운터를 증가시키는 것보다 더 빠르게 프로그램 오류 카운터에 추가합니다. 이것은 확률이 좋고 또한 방송사가 확실히 책임이 있다는 좋은 이유에 있습니다! 오류 우회가 지정된 대로 초과되면 각 노드는 먼저 실제 “수동 오류”가 됩니다. 즉, 노드가 종종 버스 웹사이트에 전혀 참여하지 않는다고 말할 수 있습니다.
기능적으로 작동하는 CAN 노드는 오류 카운터를 사용하여 오류를 감지할 뿐만 아니라 위치를 파악할 수 있습니다.
<시간>
오류 감지 메커니즘
충전 팁 이것은 버스에서 과도한 수의 DC 부분을 전달하기 위해 실행되지만 수신기에 오류 감지의 추가 수단을 제공합니다. 동일한 순위의 더 많은 연속적인 전문 비트가 버스에서와 마주치면 추가 오류가 보고됩니다. .
권장: Fortect
컴퓨터가 느리게 실행되는 것이 지겹습니까? 바이러스와 맬웨어로 가득 차 있습니까? 친구여, 두려워하지 마십시오. Fortect이 하루를 구하러 왔습니다! 이 강력한 도구는 모든 종류의 Windows 문제를 진단 및 복구하는 동시에 성능을 높이고 메모리를 최적화하며 PC를 새 것처럼 유지하도록 설계되었습니다. 그러니 더 이상 기다리지 마십시오. 지금 Fortect을 다운로드하세요!
<리>1. Fortect 다운로드 및 설치
CAN 다이어트는 오류 감지를 포함하여 몇 가지 또는 적어도 12가지 다른 기능을 정의합니다. 그들 중 2명은 상당한 수준에 있고 다른 3명은 우편 배달부의 메시지에 있습니다.
<올>
모두
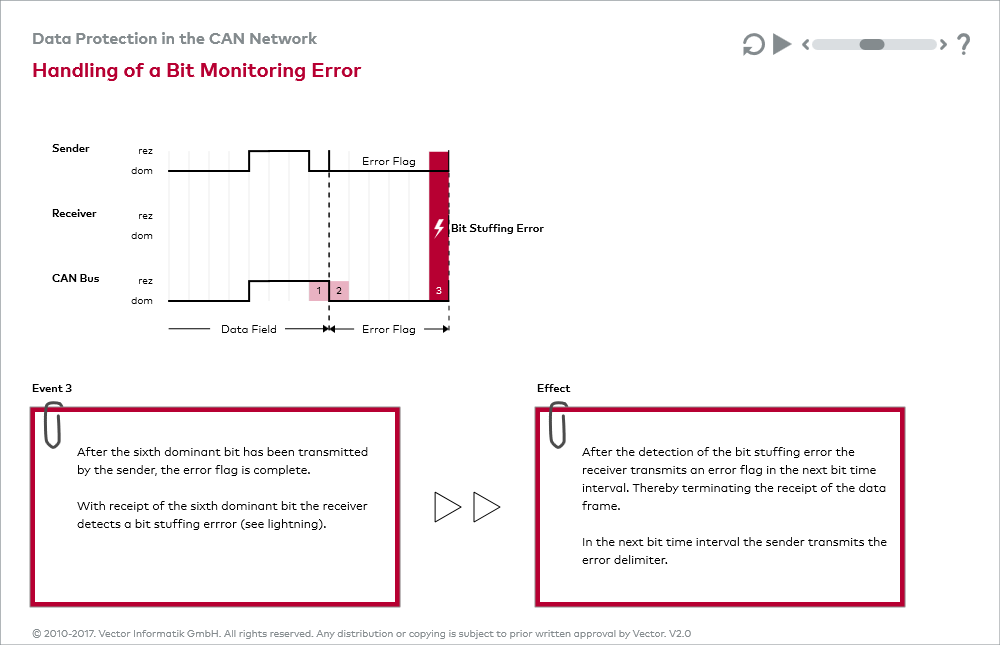
CAN 스트림의 비트 전송기는 전송된 레벨 신호를 모니터링(즉, 읽기)합니다. 실제로 읽은 비트의 정도가 별도로 전송된 것과 다르면 오류 비트를 신호한다. (프로세스 중재 중에 비트 오류가 발생하지 않습니다.) 비트 스터핑
동일한 커버링의 10개 연속 비트가 하나의 특정 노드에 의해 전송되면 노드는 전체 비트스트림에 반대Poor 계층 뒤에 여섯 번째 작은 값을 추가합니다. 이 방법을 사용하면 가장 중요한 수신기가 추가 비트를 제거합니다. 이것은 버스에서 과도한 DC 포인트를 피하기 위한 것이지만 수신기에 오류를 감지할 수 있는 추가 기회를 제공합니다. 버스 중에 동일한 번호의 연속 구성 요소가 더 많이 나타나면 Stuff 오류 믿음이 발행됩니다. 피>
프레임 확인
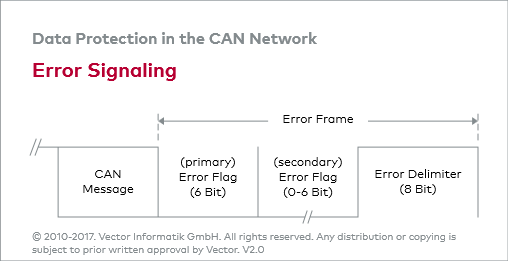
CAN 메시지의 일부는 특별한 형식을 가지고 있습니다. 예를 들어, 표준은 언제 발생해야 하는지를 지정합니다. (이 부분들은 모두 CRC 구분자, ACK 구분자, 케이스 끝, 중단이지만 이를 위한 아름다운 오류 검사 표준이 있습니다.) CAN 오퍼레이터가 이러한 고정 필드에서 아픈 사람을 감지하면 하나의 특정 양식 오류가 발생합니다. 보고했다.
확인 시험
메시지를 올바르게 전달하는 버스에서 열린 모든 노드(콘텐츠 전체에 걸쳐 단순히 “관심”인지 여부에 관계없이)는 소위 정당화 슬롯을 시간으로 지배할 것으로 예상할 수 있습니다. 메세지를 보내다. Em 전문가는 여기에 열성 수준을 보냅니다. 발신자가 ACK 슬롯의 구별 영역을 인식할 수 없으면 유용한 확인 오류가 발생합니다.
주기적인 중복 검사
각 객체는 15비트 CRC(Cyclic Redundancy Double Check) 체크섬을 가지며 모든 노드는 정신적으로 CRC를 계산한 것과 대조적으로 다른 CRC를 등록하여 CRC 오류를 연구합니다.
<시간>
오류 격리 메커니즘
버스의 모든 CAN 컨트롤러는 각 단일 메시지에서 위에서 설명한 오류를 인식하려고 시도합니다. 오류가 진단되면 탐색기 노드는 오류 헌트를 전송하여 자동 버스 트래픽을 종료합니다. 다른 노드는 오류 핀에 의해 생성된 오류를 인식하고(아직 기본 오류를 인식하지 못한 경우) 적절한 재생, 즉 H. 현재 메시지 삭제를 수행합니다.
각 노드에는 송신 오류 카운터와 실제 수신 오류 카운터의 두 가지 오류 표시가 있습니다. 이러한 카운터를 늘리거나 줄이는 데는 몇 가지 규칙이 있습니다. 기본적으로 어떤 유형의 오류가 발생하는 이메일 사용자는 수신 오류 카운터를 증가시켜야 하는 수신 노드보다 더 빠르게 제공하기 위해 오류 카운터를 증가시킵니다. 이것은 이 디퓨저에 결함이 있을 가능성이 높기 때문에 항상 있었습니다!
노드는 활성 오류 모드에서 해제된 상태로 시작합니다. 두 개의 오류 카운터 중 127개를 가리면 노드 1은 수동 오류로 알려진 모든 상태가 되며, 전송 오류 수가 255개를 초과하면 전체 노드가 버스 오프 상태가 될 수 있습니다.
<울>
카운터 오류를 늘리면서도 줄이는 규칙은 의심할 여지 없이 약간 복잡하지만 의심할 여지 없이 일반적인 원칙은 간단합니다. 전송 결점은 큰 실패 지점을 제공하고 수신 오류는 실패와 관련하여 3점을 제공합니다. 주방 카운터를 긍정적으로 낮추는 메시지 및 / 추가 메시지가 올바르게 전송되었습니다.
예(약간 단순화): 전체 전문가가 버스에 있는 노드에 결함이 있는 날이 있다고 주장한다고 가정합니다. A가 메시지 전달을 시도할 때마다 계속 작동합니다(어떤 이유로든 아니요). 이 1포인트가 보낼 때마다 오류 작업대 보내기가 8씩 증가하고 빠르게 진행되는 오류 플래그를 보냅니다. 그런 다음 메시지 전달과 결합된 실험을 하고 … 같은 일이 발생합니다.
전송된 각각의 오류 수가 100개(즉, 16회 시도)를 초과하면 노드는 사소한 오류에 대해 공격적이지 않게 됩니다. 결과는 수동 오류 플래그가 결국 버스를 통해 전송된다는 것입니다. 수동 오류 플래그는 6개의 쉬운 열성 비트로 구성되며 다른 버스 웹사이트 방문자를 죽이거나 죽이지 않습니다. 매우 다른 노드는 mci 자동차 오류에 대한 우려를 들을 수 없습니다. 그러나 나는 분포 오차 카운터를 계속 증가시켰다. 254를 초과하면 노드 A가 결국 양보하고 영역을 차지합니다.
노드 A의 다른 노드는 어떻게 생각하고 있습니까? – A가 보낸 각각의 양호한 오류 플래그에 대해 오른쪽 많은 다른 노드가 수신 오류 카운터를 하나씩 올립니다. A가 버스를 끄는 바로 그 순간에 다른 여러 노드의 전체 오류 카운터에 해당 카운터가 있습니다. 이는 수동 오류 한계, 즉 127보다 훨씬 아래에 있습니다. 이 카운터는 올바르게 수신된 모든 슬로건을 생성하기 위해 누구나 감소합니다. 그러나 노드는 모터 코치를 비활성화합니다.
대부분의 CAN 컨트롤러는 두 가지 추가 상태에 대해 국가 작업(및 해당 인터럽트)을 제공합니다.
<울>
일부 – 그러나 모두는 아닙니다! – 원격 제어는 또한 많은 오류에 대해 약간의 수동 상태를 제공합니다. 일부 리모콘은 오류 카운터에 대한 직접 로그온도 제공합니다.
문제가 시간보다 더 많이 발생할 때 자연스럽게 메시지를 재전송하도록 CAN 컨트롤러를 선택하는 것이 문제가 될 수 있습니다. 뒤죽박죽 감소의 완전한 수동 제어를 생성하는 적어도 하나의 컨트롤러(Philips SJA1000)가 시장에 있습니다.
<시간>
버스 오류 모드
널리 사용되는 ISO 11898 인증 표준에는 여러 유형의 CAN 사고 케이블 오류가 나열되어 있습니다.
<올>
장애물 1-6 및 9의 경우 버스가 훨씬 낮은 신호 대 잡음비로 생존하고 오류 8이 발생하는 동안 일부 생성 하위 시스템이 살아남는 것이 종종 “권장”됩니다. 훨씬 더 많은 오류의 경우 감소된 신호 대 잡음비에서 살아남을 수 있는 “필요하지 않습니다”. 연습
82C250 트랜시버를 작동하는 CAN 애플리케이션에는 1-7 오류가 없으며 8-9 오류가 있을 수도 있고 없을 수도 있습니다.
TJA1053을 진정으로 즐기는 드라이버는 “내결함성”이지만 때로는 모든 슬립을 처리할 수 있습니다. 일반적으로 누군가는 제한된 템포 제한으로 인해 그러한 오류에 대해 비용을 지불합니다. TJA1053은 125 5kbps입니다.
이 소프트웨어를 다운로드하고 몇 분 안에 PC를 수정하십시오. 년Can Bus Error Checking
Kann Busfehlerprufung
Puo Controllare Gli Errori Del Bus
Kan Bus Foutcontrole
Verification Des Erreurs De Bus
Pode Barrar Verificacao De Erros
Kan Bussfelskontroll
Proverka Oshibok Shiny Can
Puede La Comprobacion De Errores Del Bus
Czy Sprawdzanie Bledow Magistrali
년

