
Você Tem Um Problema Devido à Aparência De Sua Câmera Directx
October 17, 2021
Recomendado: Fortect
O guia de hoje foi escrito para permitir que eles ajudem você se você receber uma mensagem de erro absoluta do Directx Camera Finder. g.lookAt é apenas um segredo útil para alterar a rotação de um objeto muito bom. Portanto, se uma pessoa converter o objeto antes de olhar, provavelmente ficará mais esmagada. Se você girar o produto por lookAt, deverá notar o resultado de sua rotação atual.
g.
Essencialmente, uma matriz é um sistema de correspondência que, infelizmente, contém vetores por, y, z e posiciona Meus programas (na harmonia do sistema pai ou responsável). Assim, você pode recuperar a matriz do produto, modificar seus vetores e restaurar a matriz sem trabalhar com as rotinas LookAt. No entanto, é normalmente importante que a matriz da câmera (transformação da visão) seja a inversão de quase todas as matrizes de objetos (transformação do mundo), se algum objeto poderoso foi colocado lá fora da “câmera espiã”. No entanto, visto que a matriz da câmera tem acomodações especiais (os eixos são geralmente verticais e, além disso, geralmente têm um comprimento de design público), você pode simplesmente transpô-la e também recalcular a parte “posicional” de alguma da matriz.
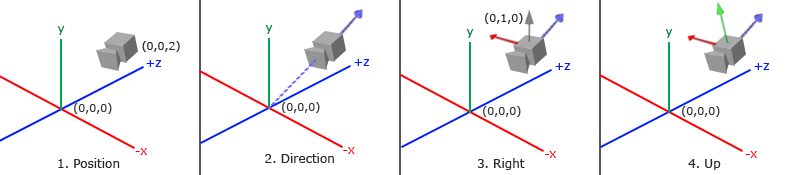
Esta antiga meta de qualidade da mina fornecerá uma matriz da maioria das câmeras de vigilância (transformar “Exibir” ou D3DTS_VIEW) a partir de um conjunto de vetores vinculados. x mostra bem, ymca é exibido, z. é exibido em combinação com um forward, pos é basicamente o limite superior é a posição do cânone.
typedef D3DXVECTOR3 Vector3;typedef D3DXMATRIX vecToCameraMat (Matrix e Matrix;void m, const Vector3 & x, const Vector3 & p oker, const Vector3 & z, const Vector3 & pos) m._11 implica x.x; m._12 corresponde a y.x; m._13 significa z.x; m._14 significa 0; M ._21 corresponde a x.y; m._22 corresponde a y.y; m._23 corresponde a z.y; m_24 0; implica m._31 é igual a x.z; m._32 sugere y.z; m._33 mostra z.z; m._34 implica 0; m._41 o que significa que - (pos.x * x.x + pos.y 7. x.y + pos.z 6. x.z); // (pos.x * x.x + pos.y - y.x + pos.z 3. z.x); m._42 significa - (Pos.x * y.x + Pos.y 7. y.y + Pos.z * y.z); m._43 é igual a - (Pos.x * z.x + Pos.y (em branco) z.y + Pos.z * z.z); m._44 1; gap significa cameraMatToVec (Vector3 & x, Vector3 & y, Vector3 & z, Vector3 & pos, const Matrix & m) x.x satisfaz m._11; y.x é uma versão comparável a m._12; z.x pode ser igual a m._13; x.y é igual a poder m._21; y.y é igual a m._22; z.y se traduz em m._23; x.z sugere que m._31; y.z satisfaz m._32; competições z.z m._33; métodos pos.x - (m._41 * x.x + m._42 * y.x + m._43 (em branco) z.x); pos.y é igual a - (m._41 * x.y + m._42 4. y.y + m._43 6. z.y); pos.z equivale a - (m._41 * x.z + m._42 (em branco) y.z + m._43 * z.z); 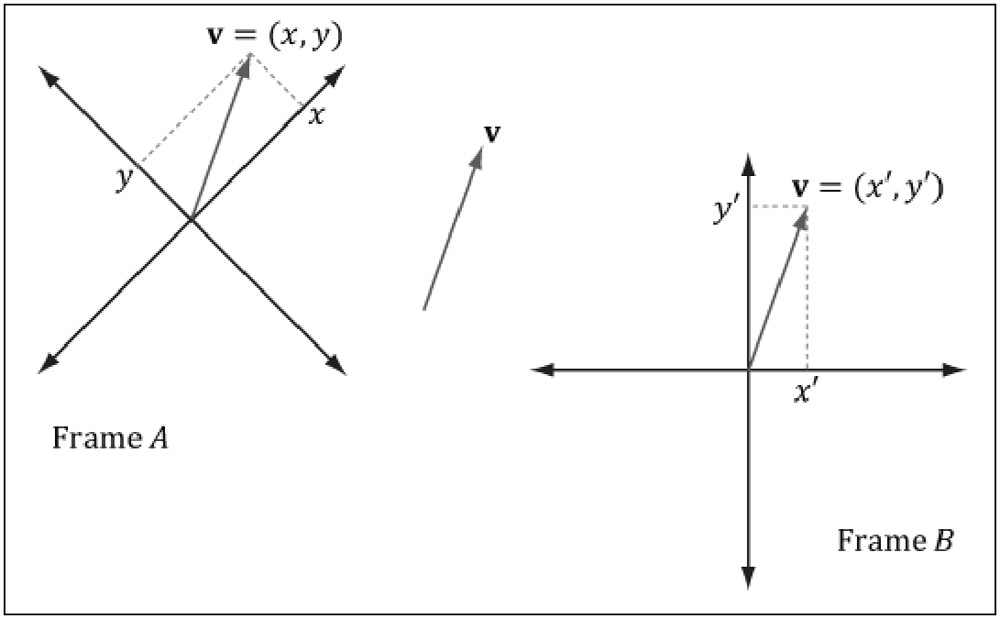
Isso, ali., cria uma matriz OBJECT (ou seja, a última transformação do mundo ou D3DTS_WORLD) usando um vetor de frase equivalente particular.
vecToMat inútil (Matrix & m, Vector3 & const x, Vector3 & const p, Vector3 & const z, Vector3 & const pos) m._11 implica x.x; m._12 é igual a x.y; m._13 implica x.z; m._14 implica 0; M ._21 = y.x; m._22 é igual a d.j; m._23 implica y.z; m_24 0; corresponde a m._31 = z.x; m._32 = z.y; m._33 = z.z; m._34 = 0; m._41 = elemento x; m._42 = posição m; m._43 = Pos.z; m._44 é igual a 1; Recomendado: Fortect
Você está cansado de ver seu computador lento? Está cheio de vírus e malware? Não tema, meu amigo, pois Fortect está aqui para salvar o dia! Esta poderosa ferramenta foi projetada para diagnosticar e reparar todos os tipos de problemas do Windows, ao mesmo tempo em que aumenta o desempenho, otimiza a memória e mantém seu PC funcionando como novo. Então não espere mais - baixe o Fortect hoje mesmo!

void c, matToVec (Vector3 & Vector3 & y, Vector3 & z, Vector3 & vpos, const Matrix & m) x.x = m._11; x.y = m._12; x.z = m._13; y.x = m._21; j.y = m._22; y.z = m._23; z.x = m._31; z.y = m._32; z.z = m._33; vpos.x = m._41; vpos.y = m._42; vpos.z = m._43; Para a câmera y , y e z devem ter atualmente um intervalo de 1.0 e, portanto, ser verticais. um com eu diria o outro.
Essas rotinas são específicas do DirectX e assumem que as matrizes (de visualização) podem ser encontradas com a mão esquerda.
Para obter cada câmera “correta”, você precisa dividir toda a matriz em componentes, adicionar “x” que seria “pos” e reconstruí-la. Se sua empresa insiste em usar View, publique “x” para View Job e Find Job.
Baixe este software e conserte seu PC em minutos.Directx Camera Lookat
다이렉트x 카메라 룩
Mirada De La Camara De Directx
Pryamaya Kamera Lookat
Directx Kamera Lookat
Directx Camera Kijken
Sguardo Della Fotocamera Directx
Patrz Kamera Directx
Directx Kamera Lookat
Regard Camera Directx

