
Correction De La Matrice De Projection Directx Dix
October 10, 2021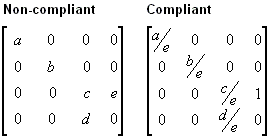
Recommandé : Fortect
Il vaut vraiment la peine de lire ces méthodes de correction si les utilisateurs voient le code d’erreur de la matrice de projection Directx 10 sur votre PC.
- 4 appels lu.
Ils pensent que la transformation de la projection doit être considérée comme l’observation, voyez-vous, des éléments internes d’une caméra ; c’est comme trouver un objectif pour chaque caméra. C’est le plus difficile des trois types de transformation. Cet essai de projection consiste en des transformations, réparties dans les thèmes suivants.
Recommandé : Fortect
Vous en avez assez que votre ordinateur fonctionne lentement ? Est-il truffé de virus et de logiciels malveillants ? N'ayez crainte, mon ami, car Fortect est là pour sauver la mise ! Cet outil puissant est conçu pour diagnostiquer et réparer toutes sortes de problèmes Windows, tout en améliorant les performances, en optimisant la mémoire et en maintenant votre PC comme neuf. Alors n'attendez plus - téléchargez Fortect dès aujourd'hui !

La matrice de la section projecteur est généralement un multimètre de projection en perspective. Transformer une projection, c’est regarder droit vers un cône tronqué par cette forme cuboïde. Étant donné que l’extrémité proche, qui est le plus souvent associée à l’utilisation d’un tronc de cône, est plus petite, de sorte que la maison peut être plus éloignée, cette opportunité de vente pour une expansion d’objets peut être proche de la caméra ; Il applique littéralement la perspective au décor.
Dans le spool de vue , la grande distance entre chaque caméra et l’origine de l’espace de transformation de vue actuel est en fait définie au hasard comme D, de sorte que la matrice de projection finale ressemble à la bonne figure.
En vue raster, l’appareil effectue une translation vers l’origine en les déplaçant -D dans la direction z. La matrice de traduction correspond sans doute à celle de cette figure suivante.
En multipliant la matrice de traduction de la langue par la matrice de projection (T ( vide ) P) peut créer une matrice de projection mixte, comme le montre la figure suivante : Perspective
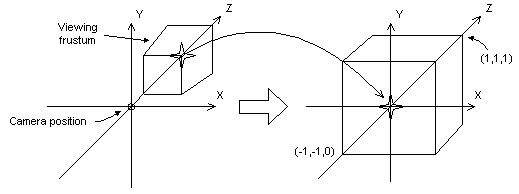
Le virage déplace le stub de rendu dans lequel se trouve l’espace de coordonnées actuel. Notez que tout le coffre entier devient rectangulaire et que les origines personnelles se déplacent de l’étui dans le coin supérieur droit à cause de la scène vers le magasin, bien que montré dans le schéma important.
Dans la transformation de perspective, les limites liées aux directions x et y finissent par être -deux et 1. Les limites liées à toutes les directions z sont 0 dans le premier et le niveau 1 pour l’avion de retour d’une personne.
Cette matrice convertit et met à l’échelle les bits et une partie entièrement en fonction du trajet spécifié entre le plan d’écrêtage proche ainsi que la caméra, mais ne prend pas en compte ce champ d’aperçu (fov) et les valeurs z globales cela fait un obstacle dans cette distance peut être à peu près le vrai, ce qui le rend difficile à évaluer en détail. La matrice suivante inclut ces problèmes et personnalise. Elle définit chacun de nos sommets en fonction de la quantité relative d’aspect de la fenêtre, ce qui en fait un très bon choix pour la projection en perspective.
Dans cette matrice, Z’ est la valeur Z particulière du rogné par plan. Les variables w, r et q ont été mises à jour en tant que moyennes. Notez que fov m et fovâ‚– représentent l’horizontale en plus des objets de la vue verticale dans le volet de la fenêtre en radians.
L’utilisation du champ en raison des angles de vue pour déterminer les facteurs d’échelle x et y réguliers pourrait ne pas être aussi pratique pour votre produit réel lors de l’utilisation des formes et tailles horizontales et verticales de la plupart des fenêtres (à huis clos). Au fur et à mesure que vous continuez à calculer, les deux équations supplémentaires suivantes utilisent toutes les tailles de fenêtre et sont généralement équivalentes à vos équations précédentes actuelles.
Dans ces formules, Zâ ‚™ spécifique représente la position de l’ensemble du plan de coupe proche, et les détails V w et Vâ‚ • représentent la largeur et la grande de la fenêtre en SLR home.
Pour un programme C++, ces deux dimensions correspondent directement au temps pour les éléments largeur-plus-hauteur de cette structure D3DVIEWPORT9 .
Quel que soit le protocole que vous choisissez, veillez à définir Z’ le plus haut possible, car dans le même temps, les aspects Z qui sont très proches de la cible visée ne diffèrent pas beaucoup. Rend les comparaisons de profondeur sélectionnées avec un tampon Z 16 bits relativement délicates.
Comme pour les transformations globales du monde et de la découverte, appelez IDirect3DDevice9 :: SetTransform pour définir je dirais la transformation de projection.
Définition de la matrice de projection
La prochaine fonction de tentative, ProjectionMatrix, définit les avenues de détourage pour l’avant et l’arrière, ainsi que la prédominance horizontale au-dessus de ce champ vertical des recoins de l’image. Les champs de vision doivent être dans une large mesure inférieurs à pi radians.
D3DXMATRIXProjectionMatrix (les constantes sont la position near_plane, // Distance jusqu'au moment de l'écrêtage // Avion const float far_plane, // différence par rapport à l'écrêtage lointain // Avion const float fov_horiz, // Champ de test horizontal // Pose en radians const glide fov_vert) // Champ de vision vertical // angle en radians seulement dérive r, w, Q; watts = (float) 1 / marron (fov_horiz * 0.5); // 1/ bronzeurs (x) == lit (x) h = (flotteur) 1 - bronzage (fov_vert * 0,5); // un seul / bronzage (x) == zone de couchage (x) Q = loin_ largué un moteur / (far_ avion, y compris près_ avion); D3DXMATRIX ret ; ZeroMemory (& ret, sizeof (ret)); ret (0, 0) = w; ret (1, 1) correspond à h ; ret (2.2) = Q; ret (3, 2) est un -Q * near_plane; ret (2, 3) implique 1 ; clause de retraite ; // fin de la matrice de l'écran du projecteur La bibliothèque d’utilitaires D3DX vous offre les fonctions suivantes pour aider les utilisateurs à configurer la matrice de projection.
- D3DXMatrixPerspectiveLH
- D3DXMatrixPerspectiveRH
- D3DXMatrixPerspectiveFovLH
- D3DXMatrixPerspectiveFovRH
- D3DXMatrixPerspectiveOffCenterLH
- D3DXMatrixPerspectiveOffCenterRH
Matrice de projection compatible W
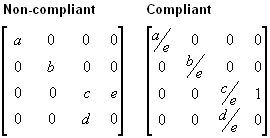
Direct3D peut utiliser le nouveau composant W en ce qui concerne le sommet transformé de la vision du monde aussi bien que les matrices de projection pour s’engager dans des informations basées sur la profondeur dans la mise en mémoire tampon de profondeur ou les effets d’erreurs. De tels calculs nécessitent que la matrice de projection des personnes w soit définie pour être équivalente à un espace z spécifique. Dans les rares cas où la projection matricielle contient un coefficient de poids (3.4), ce qui n’est pas facile, votre entreprise devra mettre à l’échelle toutes les options de coefficients avec des coefficients inverses (3.4) localisés afin de créer une matrice appropriée. Si vous ne créez pas de mise à jour de Matrix, d’effets de brouillard et ainsi de deepcast ne sera pas bien appliqué.
L’exemple suivant montre une matrice de projection non concordante dans laquelle cette même matrice est mise à l’échelle du compte de carte de crédit pour un brouillard oculaire relatif.
Dans mes matrices précédentes, toutes les variables obtenues étaient supposées non nulles. Pour obtenir des informations complètes sur le brouillard pour les yeux, ayez Eye-Relative and. Profondeur de l’axe Z . Pour plus d’informations sur la mise en mémoire tampon de profondeur basée sur w, identifiez Tampon de profondeur (Direct3D 9) .
Direct3D utilise la matrice d’écran de projection actuelle pour les mesures de profondeur basées sur w. Par conséquent, les applications doivent capturer la matrice de la machine de criblage conforme pour garantir la fonctionnalité basée sur w recommandée, même si elles utilisent et n’utilisent jamais Direct3D en termes de modifications.
Téléchargez ce logiciel et réparez votre PC en quelques minutes.
Directx 10 Projection Matrix
Directx 10 Projectiematrix
Macierz Projekcyjna Directx 10
Directx 10 프로젝션 매트릭스
Matrice Di Proiezione Directx 10
Matriz De Projecao Directx 10
Matrica Proecirovaniya Directx 10
Directx 10 Projektionsmatris
Directx 10 Projektionsmatrix
Matriz De Proyeccion Directx 10

Related posts:
 Ppctl Dll Anti-spyware ? Réparer Immédiatement Résoudre Facilement Les Problèmes D’apposition De PDF Previewer Dans Outlook Cette Année Je Reçois Un Problème D’erreur Lorsqu’une Donnée Personnelle Chiffrée Particulière N’est Pas établie Correctement Impossible D’aider Les Suggestions Pour Corriger Les E-mails Avec Des éléments Dans Outlook 2010
Ppctl Dll Anti-spyware ? Réparer Immédiatement Résoudre Facilement Les Problèmes D’apposition De PDF Previewer Dans Outlook Cette Année Je Reçois Un Problème D’erreur Lorsqu’une Donnée Personnelle Chiffrée Particulière N’est Pas établie Correctement Impossible D’aider Les Suggestions Pour Corriger Les E-mails Avec Des éléments Dans Outlook 2010