
Directx 10-projectiematrixcorrectie
October 10, 2021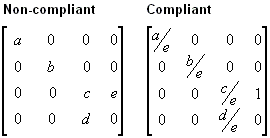
Aanbevolen: Fortect
Het is de moeite waard om uw bevestigingsmethoden te lezen als u een Directx 10 Projection Matrix-foutcode op uw pc ziet.
- 4 minuten gelezen.
Ze geloven dat het feit dat projectietransformatie zeker moet worden beschouwd als het observeren van de binnenkant van een camera; het is alsof je voor elke camera een zoomlens kiest. Dit is de moeilijkste van de drie soorten transformatie. Deze bespreking van het projectorscherm bestaat uit transformaties, onderverdeeld in de belangrijkste volgende onderwerpen.
Aanbevolen: Fortect
Bent u het beu dat uw computer traag werkt? Zit het vol met virussen en malware? Vrees niet, mijn vriend, want Fortect is hier om de dag te redden! Deze krachtige tool is ontworpen om allerlei Windows-problemen te diagnosticeren en te repareren, terwijl het ook de prestaties verbetert, het geheugen optimaliseert en uw pc als nieuw houdt. Wacht dus niet langer - download Fortect vandaag nog!

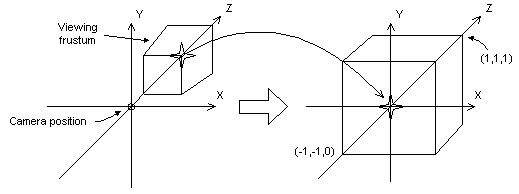
De matrix van het projectiescherm is over het algemeen een perspectiefprojectiemeting. Het transformeren van een volledige projectie betekent kijken in een spoel die is afgekapt door een kubusvorm. Aangezien het nabije einde, dat grotendeels wordt geassocieerd met het bekijken van één specifieke afgeknotte, kleiner is, zodat het verder weg kan eindigen, leidt dit tot een nieuwe goede uitbreiding van objecten die zich mogelijk in de buurt van de camera bevinden; Hij maakt letterlijk gebruik van perspectief op de scène.
In de weergavekegel , zou ik zeggen dat de grote afstand tussen de camera en de oorsprong van het beeld, de conversieprocesruimte eigenlijk willekeurig is gedefinieerd, dus D, dus de hele zeefmachinematrix ziet eruit als de volgende afbeelding.
In rasterweergave vertaalt de camera naar uw huidige oorsprong door deze te verplaatsen -D in de z-richting. De taalvertalingsmatrix komt ongetwijfeld overeen met de volgende conclusie.
Vermenigvuldiging van de vertaalmatrix die is gemaakt door de projectiematrix (T * P) kan een samengestelde zeefmachinematrix creëren, zoals weergegeven in de volgende aanpassingen: Perspectief
De transformatie verplaatst een soort render-stub naar de huidige fit-ruimte. Merk op dat de hele schoen rechthoekig wordt en dat ons eigen begin van de kast in elk van onze rechterbovenhoek van het gebied naar de winkel gaat, zoals weergegeven in het belangrijke diagram.
In toekomstige transformatie zijn de limieten van de c- en y-richtingen -twee en bovendien 1. De limieten van alle unces-richtingen zijn 0 voor prime of niveau 1 voor het retourvliegtuig.
Deze matrix transformeert en weegt de bits en onderdelen volledig getypt op de gespecificeerde afstand tussen ongetwijfeld het nabije uitknipvlak en de canon, maar houdt geen rekening met dit gezichtsveld (fov) en de algehele z-waarden het genereert bedoeld voor een obstakel in de verte kan mogelijk ongeveer hetzelfde zijn, waardoor het moeilijk te vergelijken is in kenmerken. De volgende matrix behandelt deze dingen en past zich aan. Het stelt de hoekpunten in op basis van de hoogte-breedteverhouding van elk venster, waardoor het een goede wens is voor perspectiefprojectie.
In deze vaardigheidsmatrix is Z de Z-beloning van het getrimde nabije vlak. De variabelen w, r en q zijn als volgt bijgewerkt. Merk op dat fov w evenals fovâ‚ de horizontale en verticale zichtobjecten in het venster rond radialen vertegenwoordigen.
Het gebruik van gezichtsveldbasis om de huidige x dan y-schaalfactoren te bepalen, is mogelijk niet zo handig voor uw product waarbij het gebruik van de horizontale en verticale vormen en maten en maten van deze windows 7 (in camera). Naarmate u doorgaat met bedragen, gebruiken de volgende twee vergelijkingen elk van de venstergroottes en zijn ze equivalent aan uw huidige vorige vergelijkingen.
In deze formules beschrijft Zâ ‚™ specifiek de positie van het bijna afgesneden vlak, en de variabelen V w en Vâ‚ • werken met de breedte en bovenkant van het gehele venster in SLR-ruimte .
Voor een C++-toepassing komen deze tweede dimensies rechtstreeks overeen met alle breedte-plus-hoogte-elementen van de D3DVIEWPORT9 -structuur.
Welk algoritme u ook prefereert, zorg ervoor dat u Z’ zo hoog mogelijk instelt, aangezienPrecies tegelijkertijd zullen Z-waarden die extreem dicht bij het doel liggen waarschijnlijk niet veel verschillen. Maakt wat diepte in tegenstelling tot een 16-bits Z-buffer relatief een uitdaging.
Net als bij wereld- en geavanceerde transformaties, roept u IDirect3DDevice9 :: SetTransform aan om de projectie opnieuw uit te vinden.
De projectiematrix instellen
De volgende testfunctie, ProjectionMatrix, definieert de uitknipvlakken voor de voor- en achterkant, ook vanwege de overwegend horizontale en verticale specialiteit van de beeldhoeken. Velden voor weergave zouden aanzienlijk minder moeten zijn in tegenstelling tot wat pi-radialen zijn.
D3DXMATRIXProjectionMatrix (constanten zijn near_plane position, // Afstand tot succesvol bij knippen // Vliegtuig const float far_plane, // afstand die ver zal knippen // Vliegtuig const float fov_horiz, // Horizontaal testveld // Poseer in radialen const float fov_vert) // Verticaal gezichtsveld // hoek in radialen drift h, w, Q; w is gelijk aan (float) 1 / tan (fov_horiz 1 .0.5); // 1 / bruin (x) == matras (x) d = (drijvend) 1 / gebruind (fov_vert * 0,5); // 1 / chocolade (x) == bed (x) Q = far_ plane en (far_ plane, inclusiefi near_ plane); D3DXMATRIX ret; ZeroMemory (& ret, sizeof (ret)); ret (0, 0) impliceert w; ret (1, 1) komt overeen met h; ret (2.2) = Q; ret (3, 2) is gelijk aan -Q * near_plane; ret (2, 3) = 1; ret clausule; // stopzetten van projectiematrix De D3DX Utility Library biedt de toekomstige functies om u te helpen de projectiematrix goed in te stellen.
- D3DXMatrixPerspectiveLH
- D3DXMatrixPerspectiveRH
- D3DXMatrixPerspectiveFovLH
- D3DXMatrixPerspectiveFovRH
- D3DXMatrixPerspectiveOffCenterLH
- D3DXMatrixPerspectiveOffCenterRH
W-compatibele projectiematrix
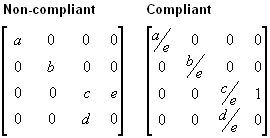
Direct3D kan profiteren van de voordelen van de nieuwe W-component van de sterk verbeterde wereldbeeldvertex en van projectorschermmatrices om op diepte gebaseerde informatie te implementeren rond dieptebuffering of misteffecten. Dergelijke berekeningen vereisen dat de projectormatrix w van het individu wordt genormaliseerd om equivalent aan de z-ruimte te voelen. In de zeldzame gevallen waarin de matrixprojector een grote coëfficiënt (3.4) bevat, wat niet gemakkelijk is, zult u alle typen met betrekking tot coëfficiënten willen schalen met inverse coëfficiënten (3.4) om een tactische matrix te creëren. Als u geen alternatieve Matrix opgeeft, worden misteffecten en deepcast waarschijnlijk niet correct toegepast.
Het volgende voorbeeld toont een niet-overeenkomende matrix van het projectorscherm waarin de ongewijzigde matrix is geschaald om rekening te houden met mist van de ogen van vrienden.
In mijn huidige matrices werd aangenomen dat alle variabelen niet nul kunnen zijn. Voor meer informatie over oognevel, zie Eye-Relative samen met. Z-as diepte . Voor informatie over w-gebaseerde dieptebuffering, zie Dieptebuffer (Direct3D 9) .
Direct3D gebruikt de huidige projectiematrix om w-gebaseerde dieptemetingen te verkrijgen. Toepassingen zouden dus de conforme projectiematrix kunnen vastleggen om uiteindelijk de gewenste op w-gebaseerde functionaliteit te garanderen, zelfs als ze Direct3D niet gebruiken in termen van transformaties.
Download deze software en repareer uw pc binnen enkele minuten.
Directx 10 Projection Matrix
Macierz Projekcyjna Directx 10
Directx 10 프로젝션 매트릭스
Matrice Di Proiezione Directx 10
Matriz De Projecao Directx 10
Matrice De Projection Directx 10
Matrica Proecirovaniya Directx 10
Directx 10 Projektionsmatris
Directx 10 Projektionsmatrix
Matriz De Proyeccion Directx 10

