Fußnote Unbekannter Capi-Fehler? Sofort Reparieren
December 29, 2021
Empfohlen: Fortect
Ich hoffe, dass dieser Artikel Ihrer ganzen Familie helfen kann, wenn es auch einen unbekannten Capi-Fehler auf dem tatsächlichen System gibt.
- runter
- JRM
- Papier
- Roboter003000060873
single-rb.php
JRM – Vol.30 Nr. 6 –S.873-879
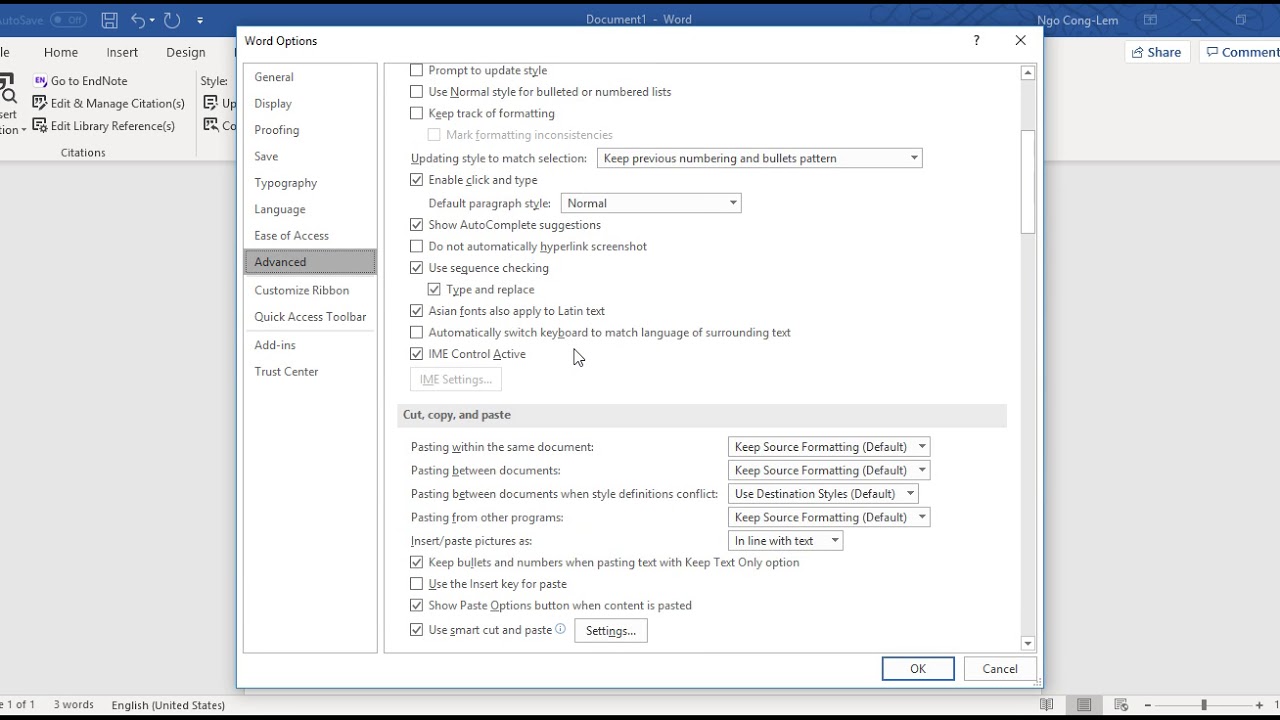
Klicken Sie in Word auf einen beliebigen Datei-Hook und wählen Sie Optionen. Wählen Sie im linken Bereich Add-Ons aus. Stellen Sie unter den ständig aktiven Anwendungs-Add-Ins sicher, dass eine Person über das EndNote Cite While You Write COM-Add-In verfügt (siehe Spalte Typ). Wenn es nicht aufgeführt ist, gehen Sie zum unteren Rand des Dropdown-Fensters Verwalten.
doi: 10.20965 / jrm.2018.p0873
D. Mac OS Mojave und neuere Versionen enthalten auch neue Sicherheits- und Datenschutzfunktionen, die möglicherweise mit der korrekten Automatisierung von EndNote in Konflikt geraten. Stellen Sie sicher, dass Microsoft Word und EndNote X # aktiviert sind. Wenn diese Key-Fact-Automatisierung deaktiviert ist, sollten die Cite While You Write-Funktionen definitiv nicht nur funktionieren.
(2018)
Papier:
Zusätzliche Anrufe im Vergleich zu den letzten 65 Tagen:1330
Chao Shao , Junki Togashi ** , Mitobe * , Kazuhisa und Genchi Kapi ***
( Leerzeichen ) Fakultät für Maschinenbau, Yamagata University, 4-3-16 Yonezawa, Yamagata 992-8510, Japan
** Kumagaigumi Co., Ltd. de 1043 Onigakubo, Tsukuba 300-2651, Japan
*** Fakultät für Maschinenbau, Hosei University, 3-7-2 Kazinocho, Koganei, Tokio 184-8584, Japan
Zuallererst sollten Sie versuchen, beispielsweise Word und EndNote in Verbindung mit einem Neustart Ihres Macintosh zu schließen. Öffnen Sie dieses Dokument und EndNote zusätzlich zu dem Versuch, die Tools erneut zu verwenden. Wir haben festgestellt, dass die Idee in vielen Fällen bugs.COM definitiv behebt.
Öffnen Sie Ihren EndNote-Block und Ihr Word-Dokument.Wählen Sie das methodisch erfasste Angebot aus, das Sie bearbeiten möchten.Klicken Sie in einem Word EndNote-Menüband auf Zitat(e) bearbeiten. Alternativ können Sie mit der rechten Maustaste zusammen mit der Option Rate ändern auswählen.
Wickeltrommeln für Raupen mit Gummibändern
In diesem Artikel ging es um die Positionierungskontrolle – einen anpassungsfähigen Roboterarm, der meine Sehnen wie zum Beispiel die Schwerkraft kontrolliert. Der Roboter wird über elastische Seile angetrieben und an der Außenseite dieser Rahmen sind Verpackungstrommeln angebracht. Als Angebot werden die bei der Industrie verfügbaren Gummiseile verwendet. Der Vorteil besteht darin, die Vorteile der nichtlinearen Natur von Kunststoffmaterialien zu nutzen, um eine kostengünstige Hypothek in Kombination mit einem flexiblen variablen Zinssatz zu erhalten. Grundsätzlich erfordert eine intensive Gravitationskompensation ein statistisches Modell mit zuverlässigen Parametern und die richtige Messung des Gewichts Ihrer unglaublichen Nutzlast. Die Notwendigkeit, detaillierte Informationen über diesen speziellen Roboter zu berücksichtigen, macht es jedoch schwierig, da er tatsächlich Vielseitigkeit, Anpassungsfähigkeit und Preiseffizienz bietet. Dieser Artikel stellt Methoden zur Neubewertung und Kompensation einer erstaunlichen Nutzlast basierend auf dem stationären Verwendungspositionsfehler und dem nominellen Anziehfaktor vor. Aufgrund der Nichtlinearität von echten Gummikabeln bleibt der Leistungsfehler nach einer Operation beim Zusammenführen mit der Schwerkraftkompensation bestehen. Die Erfahrung zeigt jedoch, dass eine einfache Wiederholung von Ihnen die gleiche Zahlung Ihrer Arbeit zweifellos den Fehler reduziert. Unter Berücksichtigung Ihrer aktuellen Nichtlinearität von Silikonstrings ist der Mechanismus wirklich theoretisch eindeutig analysiert, was die Fehleranzahl reduziert. Während der spezifische iterative Prozess Zeit braucht, erfordern einige Abhilfemaßnahmen weniger Informationen im Voraus. Darüber hinaus ist er so kostengünstig, wie ein hochentwickelter Kraftsensor erforderlich geworden ist. Da der Mechanismus auf typische Gummidrahtmaterialien anwendbar ist, verursacht er weniger Fehler, daher ist es durchaus sinnvoll, mit umfangreichen, rekonfigurierbaren Forex-Robotern zu arbeiten, um die Kosten niedrig zu halten.
- [1] Yu Xu und RP Paul, „Robot Wrist Compatible System for Vehicle Assembly“, IEEE Int. Robotics and Flight Automation Conference, .3, S. 1750-1755, 1990.
- [2] K. Koganezawa, H. Inomata und T. Nakazawa, „Ein Laufwerk mit einem elastischen nichtlinearen ComputersystemMoy und sein Paket am Handgelenk mit 3 Freiheitsgraden“, Int. Konf. Über Mechatronik und Industrieautomation, 3, l’ordre de. 1253-1260, 2005
- [3] N. Saga, J. Nagase und Y. Kondo, Entwicklung eines motorisierten Muskelsystems zur Herstellung eines pneumatischen Ballons, J. Robot. Mechatron., Vol. 2, No. 18, Nr. 2, S. 139-145, 2006.
- [4] M. T. Mason, „Matching and Force Control Computers for Controlled Manipulators“, IEEE Trans. von Systems, Man, auch Bd. Kybernetik, 11, Ausgabe 8, S. 418-432, 1981.
- [5] B.J. Weibel und H. Kazerooni, „Robot Theory and Experiments for Accurate Stability coming from all Compliance Control“, IEEE Trans. in Bezug auf Robotik und industrielle Automatisierung, 7, Nr. insgesamt, S. 95-104, 1991.
- [6] M. H. Reibert und J. J. Craig, „Hybrid Position / Force Control to Manipulators“, ASME J. von Dynamic Systems, Measurement, Control, and then Vol. 103, Nr. 2, S. 126-133, ’81.
- [7] GK Klute, JM Chernieki, ganz zu schweigen von B. Hannaford, McKibbens Artificial Pneumatic Muscle Power: Actuators with help of Biomechanical Intelligence, Proc. Int. Konf. Über die fortschrittliche intelligente Mechatronik PP. 221-226, 1999.
- [8] B. Tondu sowie ein P. Lopez Modeling and Controlodes in Verbindung mit Robotern mit künstlichen McKibben-Muskeln Zollbreite, IEEE Control Systems Journal, S. 15–38, 2007
- [9] T. Noritsugu, M. Kubota und S. Yoshimatsu, Entwicklung eines pneumatischen Schwenkantriebs aus flexiblem Silikonkautschuk, J. Robot. Mechatron., Vol. 2, No. dreizehn, Nr. 1, p. 17-22, Mitte 2001
- [10] G. Tonietti, R. Schiavi und so A. Bicchi, „Design and Control from Variable Rigidity Drive for Safe and After that Fast Physical Human-Robot Interaction“, Int. Konferenz über Robotik und Automatisierung (ICRA), S. 526-531, 2005.
- [11] K. Koganezawa, Yu. Watanabe und N. Shimizu, „Antagonistischer Muskelantrieb, seine Anwendung und Multi-d.o.f. Advanced Forearm Prosthesis”, Robotik, Band 12, Nr. 7-8, S. 771-789, Ende der Neunziger.
- [12] G. A. Pratt außerdem M. M. Williamson Series, Adaptation Mechanisms, Int. Konferenz über intelligente Roboter und / oder Systeme, Band 1, S. 399-406, 1996.
- [13] N. Hogan, „Impedance Management: A Manipulation Approach: Part II – Implementation“, ASME, J. Dyn. Sys. Maßkontrolle, Band 107, Nr. 1, S. 8-16, 1985
- [14] T. Tsuji, „Die menschliche Hand in der Impedanz mehrgelenkiger Bewegungen“, P.G. Morasso oder V. Sanguineti (Hrsg.), „Self-Organization, ComputeNny Grafikkarten und dadurch „Steuerung“, Motor des Motors Elsevier, p. 357-380, 1997.
- [15] J. Togahsi, K. Mitobe und G. Kapi, „Steuerung eines anpassungsfähigen und kostengünstigen Roboterarms, angetrieben von elastischen Sehnen“, J. Robot. Mechatron., Vol. 2, No. 28, Nr. 4, S. 509-522, 2016.
- [16] T. Lens und O. von Strick, „Untersuchung der Sicherheit der Mensch-Roboter-Interaktion für einen sequentiell belastbaren sehnengetriebenen Roboterarm“, Int. Konf. Intelligent Robots and Systems (IROS), S. 4309-4314, weiter.
- [17] T. Lens und O. von Strick, „Structural Dynamics and Model of Another Lightweight Robot Arm while using Resilient Tendon Drive“, IEEE Int. Konferenz zu Robotik in der Automatisierung (ICRA), Karlsruhe, S. 4512-4518, 6.-10. Mai 2013
- [18] H. Kobayashi, K. Hyoudou, auch D. Zu oganen, robotischen Sehnensystemen mit redundanten Sehnen, Int. Zeitschrift ähnlich der Robotikforschung, Bd. 17, Nr. Methoden, p. 561-571, 1998.
- [19] H. Aschemann und D. Schindele, „Comparison behind Human Approaches to Compensing the Hysteresis of General Strength Characteristics of Pneumatic Muscles“, IEEE Trans. Ind. Electron., V. 61, S. 3620-3629, 2014.
- [20] CJ Lin, CR Lin, SK Yu zusammen mit CT Chen, „Modellierung und Kontrolle der Hysterese des doppelten pneumatischen Pseudomuskels, die auf Prandtl-Ishlinsky unter Verwendung des Modells zeigt“, Mechatronics, Bd. 28, S. 35–45, 2015
- [21] SL Xie, HT Liu, JP Mei und GY Gu, “Modellierung und Kompensation asymmetrischer Hysterese als pneumatische künstliche Muskeln unter Verwendung eines modifizierten allgemeinen Prandtl-Ishlinsky-Modells”, Mechatronics, vol. 52, S. 49-57, 2018
- [22] S. Song, SK Xie, Z. Zhou und Yu Hu, „Modellierung eines absoluten pneumatischen künstlichen Muskels, der ein hybrides künstliches neuronales Netzwerk in Computer einbezieht“, Mechatronics, Vol. 2, No. 31, S. 124-131, Januar 2015
- [23] S. Arimoto, „Nonlinear Control Theory of Mechanical Systems: An Approach Based on Passivity as Circuit Theory“, Clarendon Press Oxford, S. 174-176, 1996.
- [24] R.M. Murray, Z. Lee, zusätzlich zu S. Sastri, A Mathematical Introduction to Robot Manipulation, CRC Press, 1994. Website
Empfohlen: Fortect
Sind Sie es leid, dass Ihr Computer langsam läuft? Ist es voller Viren und Malware? Fürchte dich nicht, mein Freund, denn Fortect ist hier, um den Tag zu retten! Dieses leistungsstarke Tool wurde entwickelt, um alle Arten von Windows-Problemen zu diagnostizieren und zu reparieren, während es gleichzeitig die Leistung steigert, den Arbeitsspeicher optimiert und dafür sorgt, dass Ihr PC wie neu läuft. Warten Sie also nicht länger - laden Sie Fortect noch heute herunter!

– Es wurde einfach mit HTML5 plus CSS3 für moderne Browser ähnlich denen von Chrome, Firefox, Safari, Opera Edge entwickelt.
Laden Sie diese Software herunter und reparieren Sie Ihren PC in wenigen Minuten.Unknown Capi Error Endnote
Onbekende Capi Fout Eindnoot
Nota Di Chiusura Errore Capi Sconosciuto
Nota Final De Error De Capi Desconocido
Okant Capi Fel Slutnot
Note De Fin D Erreur Capi Inconnue
Primechanie K Neizvestnoj Oshibke Capi
Nota Final De Erro Capi Desconhecido
알 수 없는 대문자 오류 미주
Nieznany Przypis Koncowy Bledu Capi