
Nota Al Pie De Página ¿error De Capi Confidencial? Reparar Inmediatamente
December 28, 2021
Recomendado: Fortect
Espero que, por lo general, si hay un error Capi desconocido en su sistema, este artículo de contenido pueda ayudarlo a solucionarlo.
- arriba
- JRM
- periódicos
- Robot003000060873
rb.php único
JRM – Vol.30 No. 6 –S.873-879
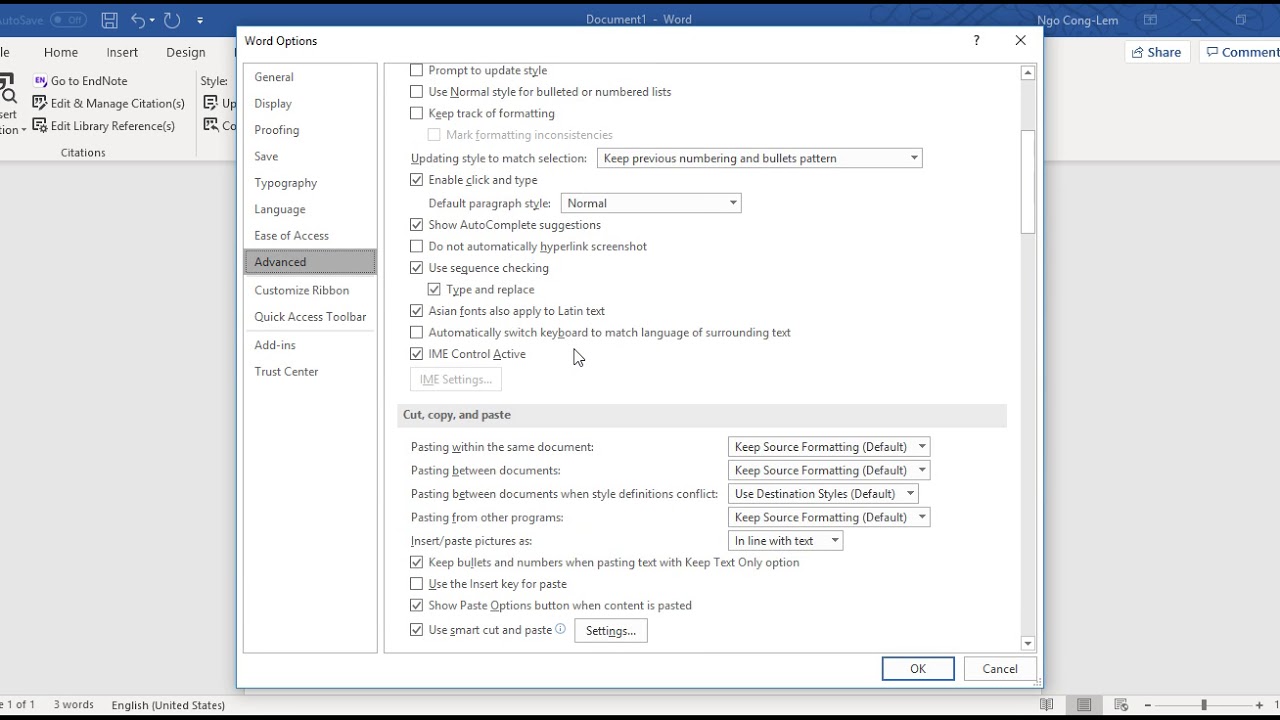
En Word, básicamente haga clic en cualquier pestaña Archivo y seleccione Opciones. Seleccione complementos en el menú izquierdo. Debajo del encabezado Complementos de aplicaciones activas, asegúrese de tener el complemento EndNote Cite While You Write COM (consulte la columna Tipo). Si apenas aparece en la lista, ve a la parte inferior de la ventana desplegable Administrar.
doi: 10.20965 versus jrm.2018.p0873
D. Mac OS Mojave y versiones posteriores incluyen nuevos puntos de venta de seguridad y privacidad y características que pueden interferir con la automatización de hechos de EndNote. Asegúrese de que Microsoft Word y EndNote X # estén realmente habilitados. Si esta automatización tiene una capacidad diferente, las acciones Citar mientras escribe definitivamente no deberían funcionar.
(2018)
Papel:
Llamadas adicionales en comparación con los últimos 60 días:1330
Chao Shao * , Junki Togashi ** , Mitobe , Kazuhisa y Genchi Kapi ***
* Departamento de Ingeniería Mecánica, Universidad de Yamagata, 4-3-16 Yonezawa, Yamagata 992-8510, Japón
** Kumagaigumi Co., Ltd. de 1043 Onigakubo, Tsukuba 300-2651, Japón
*** Facultad de Ingeniería Mecánica, Universidad de Hosei, 3-7-2 Kazinocho, Koganei, Tokio 184-8584, Japón
Lo primero que debe intentar es, por ejemplo, Word completo y EndNote junto con reiniciar su Macintosh. Abra esta página y EndNote e intente usar sus herramientas nuevamente. Nos dimos cuenta de que en los últimos casos esto definitivamente debería tener bugs.COM.
Abra su colección actual de EndNote y su documento de Word.Seleccione la cotización ordenada metódicamente que desee editar.En el cordón ancho de Word EndNote, haga clic en Editar cotizaciones. Alternativamente, los clientes pueden hacer clic con el botón derecho y seleccionar Cambiar tarifas.
Tambores de cuerda para robots con músicos elásticos
Este artículo trata sobre la gestión del posicionamiento: un brazo robótico elástico que podría controlar mis tendones como la gravedad. El hombre de metal está alimentado por cables elásticos a los tambores de embalaje que se adjuntan a la parte exterior de los marcos. Los cables de plástico disponibles en la industria, sin duda, se utilizan como paquetes. La ventaja es, sin duda, aprovechar la naturaleza no lineal de los materiales de caucho para buscar una hipoteca de costo ajustable, económica y flexible. En teoría, el salario de gravedad intensa requiere un modelo matemático con parámetros dedicados y una medición precisa del peso actual de su carga útil. Sin embargo, toda la necesidad de tener en cuenta información específica sobre el robot hace que esto sea difícil por su versatilidad, adaptabilidad y, básicamente, por su rentabilidad. Este escrito presenta métodos para reevaluar y pagar por una nueva carga útil en función del error de posición de funcionamiento estacionario mientras que el factor de apriete nominal. Debido a que se necesita la no linealidad de los terminales de goma reales, el error de funcionamiento persiste después de otra operación en combinación con la compensación de trabajo por gravedad. Sin embargo, la experiencia demuestra que una repetición sin esfuerzo del mismo pago a su empleado reducirá el error. Teniendo en cuenta la no linealidad de las cuerdas de guitarra de silicona, el mecanismo se analiza adecuadamente de forma inequívoca, lo que reduce el número de malentendidos. Si bien el proceso iterativo exacto necesita tiempo, algunos métodos requieren menos información por adelantado. Además, probablemente será económico ya que se requiere más que un sensor de fuerza extraordinario. Dado que la mayor parte del mecanismo es aplicable a los materiales típicos de alambre de plástico debido a menos problemas, tiene sentido trabajar utilizando robots reconfigurables sustanciales para mantener bajos los costos.
- [1] Yu Xu y RP Paul, “Sistema compatible con muñeca robótica para obtener ensamblaje de vehículos”, IEEE Int. Conferencia sobre robótica con automatización de vuelo, .3, págs. 1750-1755, 1990.
- [2] K. Koganezawa, H. Inomata y T. Nakazawa, “Un variador con un sistema informático no lineal elástico Moy y su aplicación en el brazo con 3 grados de flexibilidad general”, Int. Conf. Acerca de la mecatrónica y la automatización privada, 3, p. 1253-1260, junio de 2006
- [3] N. Saga, J. Nagase y Y. Kondo, Desarrollo de un sistema muscular mecanizado mediante un dispositivo neumático, J. Robot. Mechatron., Vol. 18, núm. 2, págs. 139-145, 2006.
- [4] M.T. Mason, “Computadoras de control de fuerza y emparejamiento para manipuladores controlados”, IEEE Trans. por Systems, Man también Vol. cibernética, 11, número 6, págs. 418-432, ’81.
- [5] B.J. Weibel y H. Kazerooni, “Teoría y experimentos de robots destinados a la estabilidad precisa del control de cumplimiento”, IEEE Trans. sobre robótica y mecanismo industrial, 7, núm. 1, págs. 95-104, 1991.
- [6] M. H. Reibert y así como J. J. Craig, “Control híbrido de posición y fuerza de manipuladores”, ASME J. von Sistemas dinámicos, medición, control y, por lo tanto, vol. 103, núm. 2, págs. 126-133, 1981.
- [7] GK Klute, JM Chernieki, por no observar B. Hannaford, Potencia muscular neumática artificial de McKibben: actuadores con inteligencia biomecánica, Proc. En t. Conf. Acerca de la mecatrónica sensible avanzada PP. 221-226, 1999.
- [8] B. Tondu y P. Lopez Modelado y control de robots con músculos fraudulentos de McKibben “, IEEE Control Systems Journal, págs. 15–38, 2000
- [9] T. Noritsugu, M. Kubota y S. Yoshimatsu, Desarrollo de un actuador de giro neumático flexible de caucho de silicona, J. Robot. Mechatron., Vol. 13, N ° 1, w. 17 al 22 de 2001
- [10] G. Tonietti, R. Schiavi y A. Bicchi, “Diseño y control de la unidad de rigidez variable para una interacción física rápida y segura entre humanos y robots”, Int. Conferencia sobre Robótica y como consecuencia Automatización (ICRA), págs. 526-531, 2005.
- [11] K. Koganezawa, Yu. Watanabe, así como N. Shimizu, “Antagonistic Muscle Drive, su aplicación y Multi-d.o.f. Prótesis de antebrazo avanzada “, Robótica, Volumen 12, No. 7-8, págs. 771-789, 1997.
- [12] G. A. Pratt y M. M. Williamson Series, Mecanismos de adaptación, Int. Conferencia a través de Intelligent Robots and Systems, Volumen uno en particular, págs. 399-406, 1995.
- [13] N. Hogan, “Gestión de impedancia: un enfoque de manipulación: Parte II – Implementación”, ASME, J. Dyn. Sys. Control dimensional, masa 107, no. 1, págs. 8-16, 85
- [14] T. Tsuji, “El ser humano hábil en la impedancia de los movimientos multiarticulares”, P.G. Morasso y V. Sanguineti (ed.), “Self-Organization, ComputeNny cards y, como gran resultado,” control “, motor Elsevier, p. 357-380, 1997.
- [15] J. Togahsi, K. Mitobe y G. Kapi, “Control de ese brazo robótico adaptable y de bajo costo impulsado por tendones elásticos”, J. Robot. Mechatron., Vol. 28, núm. 4, págs. 509-522, 2016.
- [16] T. Lens además O. von Strick, “Investigación de cada seguridad de la interacción humano-robot para un buen brazo robótico secuencialmente resistente impulsado por tendones”, Int. Conf. Robots y sistemas inteligentes (IROS), págs. 4309-4314, 2012.
- [17] T. Lens y O. von Strick, “Dinámica estructural y modelo de otro brazo robótico liviano con impulsión de tendón resistente”, IEEE Int. Conferencia sobre robótica hasta el final a través de la automatización (ICRA), Karlsruhe, págs. 4512-4518, 6.-10. Mayo de 2013
- [18] H. Kobayashi, K. Hyoudou y D. Con respecto al ogane, mecanismos de tendones robóticos con tejido blando redundante, Int. Revista de investigación robótica, vol. 17, núm. 5, pág. 561-571, 1996.
- [19] H. Aschemann y D. Schindele, “Comparación de enfoques humanos para poder compensar la histéresis de las características generales de fuerza de los músculos neumáticos”, IEEE Trans. Ind. Electron., V. 61, págs. 3620-3629, 2014.
- [20] CJ Lin, CR Lin, SK Yu y CT Chen, “Modelado y control de la histéresis del pseudomúsculo neumático doble de Prandtl-Ishlinsky Usando verás, el modelo”, Mecatrónica, vol. 28, págs. 35–45, 2015
- [21] SL Xie, HT Liu, JP Mei y GY Gu, “Modelado y compensación de histéresis asimétrica aunque músculos artificiales neumáticos usando un modelo general modificado de Prandtl-Ishlinsky”, Mecatrónica, vol. 42 tommers skrrrm, págs. 49-57, 2018
- [22] S. Song, SK Xie, Z. Zhou, por lo que Yu Hu, “Modelado de un músculo artificial absoluto impulsado neumáticamente utilizando una red neuronal híbrida antinatural de computadoras”, Mecatrónica, vol. 31, págs. 124-131, enero de 2015
- [23] S. Arimoto, “Teoría de control no lineal de sistemas mecánicos: un enfoque basado en la pasividad y la teoría de circuitos”, Clarendon Press Oxford, págs. 174-176, 1996.
- [24] R.M. Murray, Z. Lee, cuando se trata de adiciones a S. Sastri, A Mathematical Introduction to Robot Manipulation, CRC Press, 1994. Sitio web
Recomendado: Fortect
¿Estás cansado de que tu computadora funcione lentamente? ¿Está plagado de virus y malware? ¡No temas, amigo mío, porque Fortect está aquí para salvar el día! Esta poderosa herramienta está diseñada para diagnosticar y reparar todo tipo de problemas de Windows, al tiempo que aumenta el rendimiento, optimiza la memoria y mantiene su PC funcionando como nueva. Así que no esperes más: ¡descarga Fortect hoy mismo!

* Está convenientemente diseñado con HTML5 más CSS3 con respecto a los navegadores modernos como Chrome, Firefox, Safari, Opera Edge,.
Descarga este software y repara tu PC en minutos.Unknown Capi Error Endnote
Onbekende Capi Fout Eindnoot
Nota Di Chiusura Errore Capi Sconosciuto
Okant Capi Fel Slutnot
Note De Fin D Erreur Capi Inconnue
Primechanie K Neizvestnoj Oshibke Capi
Nota Final De Erro Capi Desconhecido
알 수 없는 대문자 오류 미주
Unbekannter Capi Fehler Endnote
Nieznany Przypis Koncowy Bledu Capi

Related posts:
 La Forma Ideal De Resolver Los Problemas Básicos De Protección Antivirus Y Antispyware De Symantec Frente A Los Problemas De Protección Estándar
La Forma Ideal De Resolver Los Problemas Básicos De Protección Antivirus Y Antispyware De Symantec Frente A Los Problemas De Protección Estándar  Cómo Adjuntar El Paquete De Servicio Wakelock Htc
Cómo Adjuntar El Paquete De Servicio Wakelock Htc  Solución De Problemas De La BIOS De Altos G330 Mk2
Solución De Problemas De La BIOS De Altos G330 Mk2  ¿Cómo Podría Corregir El Id. De Evento De Error De Microsoft 7023?
¿Cómo Podría Corregir El Id. De Evento De Error De Microsoft 7023?