
Note De Bas De Page Erreur Capi Inconnue ? Réparer Immédiatement
December 28, 2021
Recommandé : Fortect
J’espère qu’en cas d’erreur Capi inconnue sur votre système, cet article pourra vous aider à la corriger.
- tout en haut
- JRM
- morceaux de papier
- Robot003000060873
single-rb.php
JRM – Vol.30 No. 6 –S.873-879
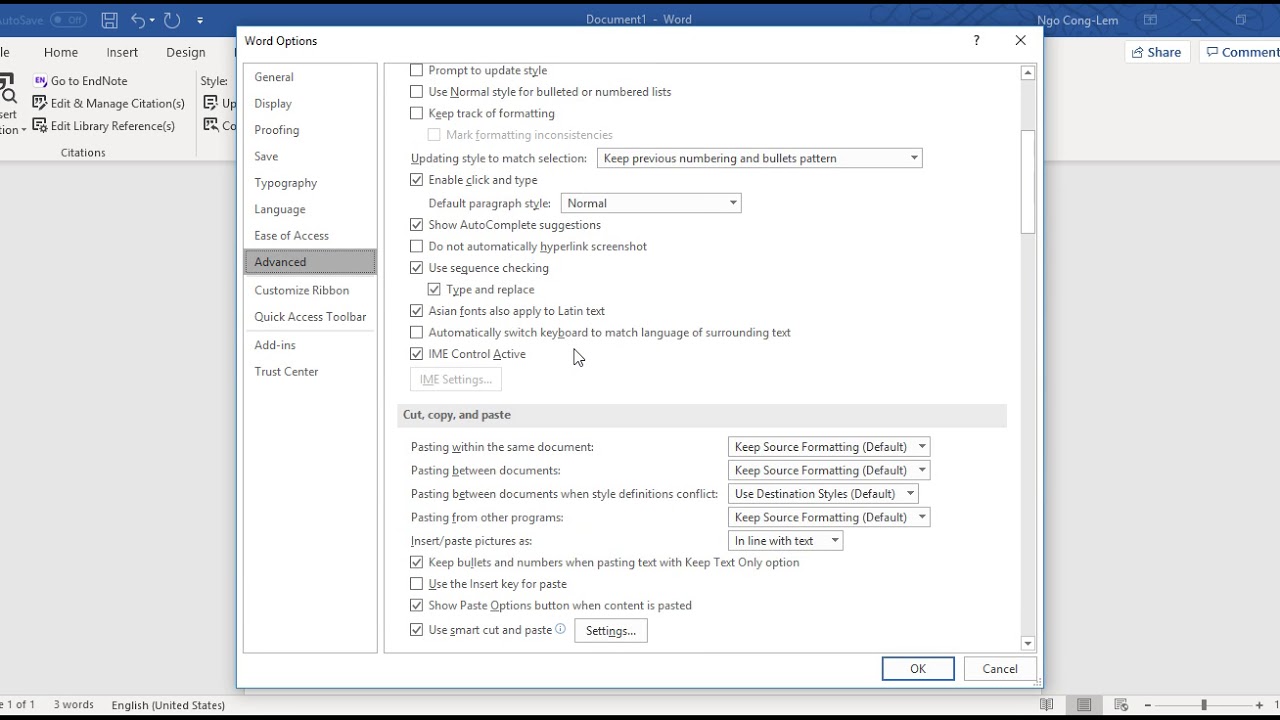
Dans Word, cliquez sur plusieurs onglets Fichier et sélectionnez Options. Sélectionnez les modules complémentaires dans le volet de gauche. Sous le titre Compléments d’application actifs, assurez-vous d’avoir le complément COM EndNote Cite While You Write (voir la colonne Type). Si ce n’est pas indiqué, allez au bas de toutes les fenêtres déroulantes Gérer.
doi : 10.20965 pour chaque jrm.2018.p0873
RÉ. Mac OS Mojave et versions ultérieures proposent également de nouvelles fonctionnalités de sécurité et de confidentialité qui peuvent interférer avec le bon fonctionnement automatisé d’EndNote. Assurez-vous que Microsoft Word et EndNote X # sont autorisés. Si cette automatisation est désactivée, toutes les fonctions Cite While You Write ne voudront certainement pas fonctionner.
(2018)
Papier :
Appels supplémentaires par rapport aux 60 derniers jours en général :1330
Chao Shao * , Junki Togashi ** , Mitobe * , Kazuhisa et Genchi Kapi ** *
* Département de génie mécanique, Université de Yamagata, 4-3-16 Yonezawa, Yamagata 992-8510, Japon
** Kumagaigumi Co., Ltd. l’ordre de 1043 Onigakubo, Tsukuba 300-2651, Japon
*** Faculté de génie mécanique, Université Hosei, 3-7-2 Kazinocho, Koganei, Tokyo 184-8584, Japon
Ouvrez toute votre collection EndNote et votre document Word.Sélectionnez notre propre devis méthodiquement ordonné que vous souhaitez afin que vous puissiez le modifier.Dans le ruban Word EndNote, sélectionnez Modifier le ou les devis. Alternativement, dans de nombreux cas, vous pouvez cliquer avec le bouton droit de la souris et sélectionner Modifier les taux.
Percussion à enroulement pour robots avec groupes élastiques
Cet article concerne le positionnement suppress – un bras robotique élastique dont l’idée contrôle mes nerfs comme la gravité. Le robot est probablement alimenté par des câbles élastiques et des tambours de chargement sont fixés à l’extérieur droit des cadres. Les fondamentaux du caoutchouc disponibles dans l’industrie sont recommandés sous forme de lots. L’avantage est de pouvoir vraiment profiter de la qualité non linéaire des matériaux en caoutchouc pour obtenir un très bon crédit immobilier à taux variable peu coûteux et flexible. En théorie, une compensation de gravité intense donne un modèle mathématique avec des contraintes fiables et une mesure précise de la charge de votre charge utile. Cependant, le fait de vouloir vraiment prendre en compte des stratégies et des informations détaillées sur le robot rend assez difficile sa polyvalence, son adaptabilité, ainsi que sa rentabilité. Cet article présente des idées de méthodes pour réévaluer et compenser pour travailler avec une nouvelle charge utile en fonction de toutes les erreurs de position de fonctionnement stationnaire et de votre facteur de serrage nominal actuel. En raison de cette non-linéarité des vrais câbles en caoutchouc, une partie de l’erreur de fonctionnement persiste après une utilisation en combinaison avec une compensation de gravité. Cependant, l’expérience montre qu’une simple pratique du même paiement que votre travail réduira sans aucun doute l’erreur. Prenant en page Internet la non-linéarité des cordes en silicone, un mécanisme est analysé théoriquement sans ambiguïté, ce qui, selon les experts, réduit le nombre d’erreurs. Alors que le processus itératif exact prend de la saison, certaines méthodes nécessitent moins d’informations trouvées à l’avance. De plus, il est rentable car plus qu’un capteur de stress sophistiqué est requis. Étant donné que l’approche est applicable aux matériaux de cordon en caoutchouc typiques en raison de moins d’erreurs, il est logique de travailler avec des robots critiques et reconfigurables pour maintenir les coûts sur papier.
- [1] Yu Xu et RP Paul, « Robot Wrist Compatible System for Vehicle Assembly », IEEE Int. Conférence sur la robotique et l’automatisation des vols, .3, pp. 1750-1755, 2001.
- [2] K. Koganezawa, H. Inomata et T. Nakazawa, « A Drive featuring an Elastic Nonlinear Computer SystemMoy et ensuite son application sur le poignet en plus de 3 degrés de liberté », Int. Conf. A propos de la mécatronique et de l’automatisation industrielle, 3, p. 1253-1260, 2005
- [3] N. Saga, J. Nagase et Y. Kondo, Développement d’un système musculaire motorisé à l’aide d’un ballon pneumatique, J. Robot. Mécatron., Vol. 18, n° b, pp. 139-145, 2006.
- [4] M.T. Mason, « Ordinateurs de correspondance et de contrôle de force pour les manipulateurs contrôlés », IEEE Trans. à travers le processus de Systems, Man aussi Vol. cybernétique, 15, numéro 6, pp. 418-432, 1981.
- [5] B.J. Weibel et H. Kazerooni, « Théorie et expériences des robots pour une stabilité précise du contrôle de la conformité », IEEE Trans. sur la robotique et l’automatisation industrielle, quelques-uns, n° 1, pp. 95-104, 1991.
- [6] M. H. Reibert et J. J. Craig, « Hybrid Position / Force Control of Manipulators », ASME J. von Dynamic Systems, Measurement, Control, and after Vol. 103, n° 2, pp. 126-133, 1981.
- [7] GK Klute, JM Chernieki, sans oublier B. Hannaford, McKibben’s Artificial Pneumatic Muscle Power: Actuators with Biomechanical Intelligence, Proc. Int. Conf. À propos de la mécatronique raisonnable avancée PP. 221-226, 1999.
- [8] B. Tondu et P. Lopez Modélisation et de plus Controlodes of robots with artificial McKibben muscles”, IEEE Control Systems Journal, pp. 15-38, 2000
- [9] T. Noritsugu, M. Kubota et S. Yoshimatsu, Développement d’un actionneur de pivotement pneumatique en caoutchouc de silicone flexible, J. Robot. Mécatron., Vol. 13, n° 1, p. 17-22, 1995
- [10] G. Tonietti, R. Schiavi et A. Bicchi, « Conception avec contrôle de l’entraînement à rigidité variable concernant l’interaction physique humain-robot sûre et rapide », Int. Conférence sur la robotique et l’automatisation (ICRA), pp. 526-531, 2005.
- [11] K. Koganezawa, Yu. Watanabe et N. Shimizu, « L’entraînement musculaire antagoniste, son application et le multi-d.o.f. Prothèse avancée d’avant-bras partout., Robotique, volume 12, n° 7-8, pp. 771-789, 1997.
- [12] Série G. A. Pratt et M. M. Williamson, Mécanismes d’adaptation, Int. Conférence sur les robots et systèmes intelligents, Volume 1, pp. 399-406, 1995.
- [13] N. Hogan, « Gestion de l’impédance : une approche de manipulation : partie II – Mise en œuvre », ASME, J. Dyn. Sys. Contrôle dimensionnel, volume 107, juste. 1, p. 8-16, 1985
- [14] T. Tsuji, « La main humaine à l’intérieur de l’impédance des mouvements multi-articulaires », P.G. Morasso et V. Sanguineti (dir.), « Auto-organisation, cartes ComputeNny et, par conséquent, « contrôle », moteur Elsevier, p. 357-380, le milieu des années 90.
- [15] J. Togahsi, K. Mitobe et G. Kapi, « Controlling an Adaptable and Low-Cost Robotic Arm Powered essentiellement Elastic Tendons », J. Robot. Mécatron., Vol. 28, n° 4, pp. 509-522, 2016.
- [16] T. Lens et O. von Strick, « Investigation of the Safety of Human-Robot Interaction for a Sequentially Resilient Tendon-Driven Robotic Arm », Int. Conf. Robots et systèmes intelligents (IROS), pp. 4309-4314, 2012.
- [17] T. Lens et O. von Strick, « Dynamique structurelle et modèle d’un autre bras de robot léger avec entraînement par tendon résilient », IEEE Int. Conférence sur la robotique dans l’automatisation (ICRA), Karlsruhe, pp. 4512-4518, 6.-10. Mai 2013
- [18] H. Kobayashi, K. Hyoudou et D. Concernant l’ogane, mécanismes tendineux automatiques à tendons redondants, Int. Journal de recherche en robotique, vol. plus de dix-sept ans, n° 5, p. 561-571, 1998.
- [19] H. Aschemann et D. Schindele, « Comparaison des approches humaines pour compenser l’hystérésis des caractéristiques générales de force des muscles pneumatiques », IEEE Trans. Ind. Electron., V. 61, pp. 3620-3629, cette année.
- [20] CJ Lin, CR Lin, SK Yu et CT Chen, « Modélisation combinée avec le contrôle de l’hystérésis du double pseudomuscle pneumatique de Prandtl-Ishlinsky à l’aide du modèle », Mechatronics, Vol. 28, p. 35-45, 2015
- [21] SL Xie, HT Liu, JP Mei et GY Gu, “Modélisation et compensation de l’hystérésis asymétrique en tant que muscles artificiels pneumatiques à l’aide d’un modèle général modifié de Prandtl-Ishlinsky”, Mechatronics, vol. 52, p. 49-57, 2018
- [22] S. Song, SK Xie, Z. Zhou et Yu Hu, « Modélisation d’un faux muscle pneumatique absolu à l’aide d’un réseau d’ordinateurs hybrides artificiels manquant de sensations », Mechatronics, Vol. 29, p. 124-131, janvier 2015
- [23] S. Arimoto, « Théorie du contrôle non linéaire de la plupart des systèmes mécaniques : une approche basée sur la passivité et la théorie des circuits », Clarendon Press Oxford, pp. 174-176, 1996.
- [24] R.M. Murray, Z. Lee, en complément de S. Sastri, A Mathematical Introduction to Robot Manipulation, CRC Press, 94′. Site Web
Recommandé : Fortect
Vous en avez assez que votre ordinateur fonctionne lentement ? Est-il truffé de virus et de logiciels malveillants ? N'ayez crainte, mon ami, car Fortect est là pour sauver la mise ! Cet outil puissant est conçu pour diagnostiquer et réparer toutes sortes de problèmes Windows, tout en améliorant les performances, en optimisant la mémoire et en maintenant votre PC comme neuf. Alors n'attendez plus - téléchargez Fortect dès aujourd'hui !

* Il est simplement conçu avec HTML5 plus CSS3 pour les navigateurs à jour comme Chrome, Firefox, Safari, Opera Edge ,.
Téléchargez ce logiciel et réparez votre PC en quelques minutes.Unknown Capi Error Endnote
Onbekende Capi Fout Eindnoot
Nota Di Chiusura Errore Capi Sconosciuto
Nota Final De Error De Capi Desconocido
Okant Capi Fel Slutnot
Primechanie K Neizvestnoj Oshibke Capi
Nota Final De Erro Capi Desconhecido
알 수 없는 대문자 오류 미주
Unbekannter Capi Fehler Endnote
Nieznany Przypis Koncowy Bledu Capi

Related posts:
 Besoin De Se Débarrasser Des Problèmes Avec Bios Neo Geo Kawaks 1.62
Besoin De Se Débarrasser Des Problèmes Avec Bios Neo Geo Kawaks 1.62  Quelles Sont Les Raisons De Conserver L’accès DHCP Et Comment S’en Occuper ?
Quelles Sont Les Raisons De Conserver L’accès DHCP Et Comment S’en Occuper ?  La Meilleure Façon De Rectifier Les Problèmes De Phplist Est De Désactiver Le Mode Sans échec.
La Meilleure Façon De Rectifier Les Problèmes De Phplist Est De Désactiver Le Mode Sans échec.  Comment Puis-je Simplement Nommer Le Panneau De Contrôle D’une Personne ?
Comment Puis-je Simplement Nommer Le Panneau De Contrôle D’une Personne ?