
Voetnoot Onbekende Capi-fout? Onmiddellijk Repareren
December 28, 2021
Aanbevolen: Fortect
Ik hoop dat, veronderstel dat er een onbekende Capi-fout op uw systeem is, dit artikel u zal helpen dit op te lossen.
- hulpprogramma
- JRM
- papieren
- Robot003000060873
single-rb.php
JRM – Vol.30 No. 6 –S.873-879
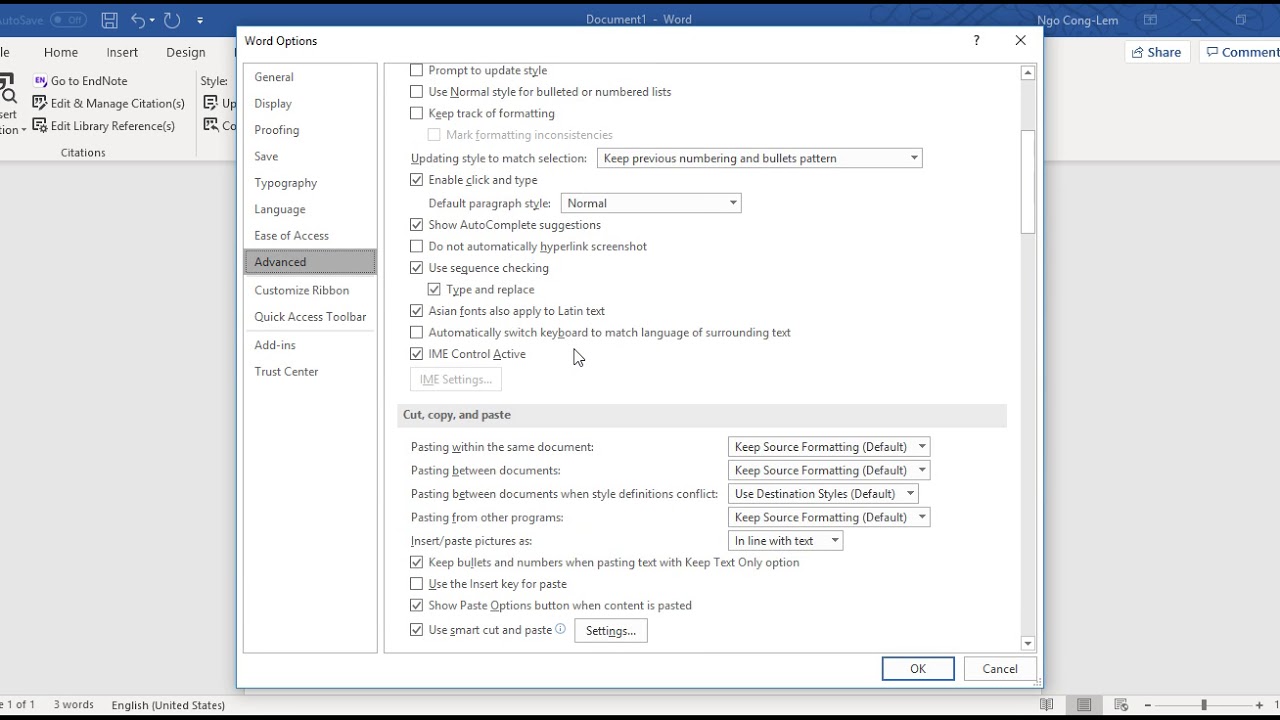
Klik in Word op een tabblad Bestand en selecteer Opties. Selecteer add-ons in het linkerdeelvenster. Probeer onder het kopje Active Application Add-ins te zorgen dat je de EndNote Cite While You Write COM-invoegtoepassing hebt (zie kolom Type). Als het niet wordt vermeld, gaat u naar de onderkant van het vervolgkeuzemenu Beheren.
doi: 10.20965 en jrm.2018.p0873
D. Mac OS Mojave en later hebben ook nieuwe beveiligings- en privacyfuncties die de correcte automatisering van EndNote vaak kunnen verstoren. Zorg ervoor dat Microsoft Word en EndNote X # zijn uitgerust. Als deze automatisering is uitgeschakeld, moeten de Cite While You Write-functies absoluut niet werken.
(2018)
Papier:
Extra oproepen vergeleken met de laatste 60 dagen:1330
Chao Shao * , Junki Togashi ** , Mitobe * , Kazuhisa en Genchi Kapi ** *
* Afdeling verbonden aan Werktuigbouwkunde, Yamagata University, 4-3-16 Yonezawa, Yamagata 992-8510, Japan
** Kumagaigumi Co., Ltd. p 1043 Onigakubo, Tsukuba 300-2651, Japan
*** Faculteit Werktuigbouwkunde, Hosei University, 3-7-2 Kazinocho, Koganei, Tokyo 184-8584, Japan
< div style="box-shadow: rgba(67, 71, 85, 0.27) 0px 0px 0.25em, rgba(90, 125, 188, 0.05) 0px 0.25em 1em;padding:20px 10px 20px 10px;">
Het eerste dat u moet proberen, is bijvoorbeeld Word en EndNote te sluiten in combinatie met het opnieuw opstarten van uw Macintosh. Open dit document alsnog EndNote en probeer nogmaals de werkplektools te gebruiken. We realiseerden ons dat dit in verschillende gevallen zeker zal zijn om bugs.COM te starten.
Open een nieuwe EndNote-verzameling en Word-document.Selecteer ik zou zeggen de methodisch geordende offerte die u zeker wilt bewerken.Op het Word EndNote-lint, bezoeker Citaat(en) bewerken. U kunt ook met de rechtermuisknop klikken en Tarieven wijzigen selecteren.
Opwindbare percussie voor robots met elastische band
Dit artikel gaat over het positioneren van een stoeprand – een elastische robotarm die door de meeste van mijn zenuwen wordt bestuurd, zoals de zwaartekracht. De robot wordt altijd aangedreven door elastische kabels en opslagtrommels zijn bevestigd aan de buitenkant van het huis van de frames. De in de industrie beschikbare rubber basics worden als bundels geadministreerd. Het voordeel komt terug om te profiteren van de niet-lineaire flora en fauna van rubbermaterialen om een bepaald goedkoop en flexibel aanpasbaar tarief voor hypotheekaflossingen te verkrijgen. In theorie heeft intense zwaartekrachtcompensatie een wiskundig model met betrouwbare specificaties en nauwkeurige meting van het lichaamsgewicht van uw lading. De noodzaak om rekening te houden met gedetailleerde kennis over de robot maakt het echter problematisch vanwege zijn veelzijdigheid, aanpassingsvermogen en kosteneffectiviteit. Dit artikel bevat methoden voor het opnieuw evalueren en compenseren om een nieuwe lading te ontvangen op basis van de stationaire bedrijfspositiefout en een deel van de nominale aanhaalfactor. Door elke niet-lineariteit van echte rubberen kabels, blijft er een soort bedieningsfout bestaan na één productie in combinatie met zwaartekrachtcompensatie. De ervaring leert echter dat een eenvoudige herhaling van dezelfde betaling die u verricht, ook de fout zal verminderen. Rekening houdend met de niet-lineariteit van siliconensnaren, wordt het belangrijkste mechanisme theoretisch ondubbelzinnig geanalyseerd, wat waarschijnlijk het aantal fouten vermindert. Hoewel het exacte iteratieve proces kostbare tijd kost, vereisen sommige methoden van tevoren minder informatie. Bovendien is het niet duur omdat er meer nodig is dan een geavanceerde sensor voor het genereren van energie. Omdat de hulpbron toepasbaar is op typische rubberen touwmaterialen vanwege minder fouten, is het zinvol om met stevige, herconfigureerbare robots te werken om de kosten laag te houden.
- [1] Yu Xu en RP Paul, “Robot Wrist Compatible System for Vehicle Assembly”, IEEE Int. Robotics and Flight Automation Conference, .3, pp. 1750-1755, 2001.
- [2] K. Koganezawa, H. Inomata en T. Nakazawa, “Een schijf met een elastisch niet-lineair computersysteemMoy en daarom de toepassing om de pols met 3 vrijheidsgraden”, Int. Conf. Over mechatronica en industriële automaten, 3, p. 1253-1260, 2005
- [3] N. Saga, J. Nagase en Y. Kondo, Ontwikkeling van een gemotoriseerd, heerlijk gesneden systeem met behulp van een pneumatische ballon, J. Robot. Mechatron., Vol. 18, nr. slechts twee, pp. 139-145, 2006.
- [4] M.T. Mason, “Matching and Force Control Computers voor gecontroleerde manipulatoren”, IEEE Trans. keer Systems, Man ook Vol. cybernetica, 16, uitgave 6, pp. 418-432, 1981.
- [5] B.J. Weibel en H. Kazerooni, “Robottheorie en experimenten voor nauwkeurige stabiliteit van nalevingscontrole”, IEEE Trans. over robotica en industriële automatisering, talrijk, nr. 1, pp. 95-104, 1991.
- [6] M. H. Reibert en J. J. Craig, “Hybrid Position / Force Control of Manipulators”, ASME J. von Dynamic Systems, Measurement, Control en tot slot Vol. 103, nr. 2, blz. 126-133, 1981.
- [7] GK Klute, JM Chernieki, en niet te vergeten B. Hannaford, McKibben’s Artificial Pneumatic Muscle Power: Actuators with Biomechanical Intelligence, Proc. Int. Conf. Over de geavanceerde slimme mechatronica PP. 221-226, 1999.
- [8] B. Tondu en P. Lopez Modellering en eenvoudig Controlodes van robots met kunstmatige McKibben-spieren “, IEEE Control Systems Journal, pp. 15-38, 2000
- [9] T. Noritsugu, M. Kubota en S. Yoshimatsu, ontwikkeling van een flexibele pneumatische zwenkaandrijving van siliconenrubber, J. Robot. Mechatron., Vol. 13, nr. 1, blz. 17-22, ’01
- [10] G. Tonietti, R. Schiavi en A. Bicchi, “Ontwerp en ook controle van variabele stijfheidsaandrijving om veilige en snelle fysieke interactie tussen mens en robot te bereiken”, Int. Conferentie over robotica en automatisering (ICRA), pp. 526-531, 2005.
- [11] K. Koganezawa, Yu. Watanabe en N. Shimizu, “Antagonistische spieraandrijving, de toepassing en multi-d.o.f. Advanced Forearm Prosthesis inches tall, Robotics, Volume 12, No. 7-8, pp. 771-789, 1997.
- [12] G.A. Pratt en M.M. Williamson Series, Adaptation Mechanisms, Int. Conferentie over intelligente robots en systemen, deel 1, blz. 399-406, 1995.
- [13] N. Hogan, “Impedantiebeheer: een manipulatiebenadering: deel II – implementatie”, ASME, J. Dyn. Sys. Maatregeling, volume 107, niet a. 1, blz. 8-16, 1985
- [14] T. Tsuji, “De menselijke hand wanneer de impedantie van bewegingen met meerdere gewrichten”, P.G. Morasso en V. Sanguineti (red.), “Zelforganisatie, ComputeNny-kaarten en, om te beginnen, “controle”, motor Elsevier, p. 357-380, ’97.
- [15] J. Togahsi, K. Mitobe en G. Kapi, “Een aanpasbare en goedkope robotarm besturen die eenvoudig wordt aangedreven door elastische pezen”, J. Robot. Mechatron., Vol. 28, nr. 4, pp. 509-522, 2016.
- [16] T. Lens en O. von Strick, “Onderzoek naar de veiligheid van mens-robotinteractie voor een sequentieel veerkrachtige peesaangedreven robotarm”, Int. Conf. Intelligente robots en systemen (IROS), pp. 4309-4314, 2012.
- [17] T. Lens en O. von Strick, “Structurele dynamiek en model van een andere lichtgewicht robotarm met veerkrachtige peesaandrijving”, IEEE Int. Conferentie over robotica in automatisering (ICRA), Karlsruhe, blz. 4512-4518, 6.-10. mei 2013
- [18] H. Kobayashi, K. Hyoudou en D. Met betrekking tot ogane, automatische peesmechanismen met overtollige pezen, Int. Journal of Robotics Research, Vol. achttien, nr. 5, p. 561-571, 1998.
- [19] H. Aschemann en D. Schindele, “Vergelijking van menselijke benaderingen om de hysterese van algemene krachtkenmerken van pneumatische spieren te compenseren”, IEEE Trans. Ind. Electron., V. 61, pp. 3620-3629, dit jaar.
- [20] CJ Lin, CR Lin, SK Yu en CT Chen, “Modelvorming en als gevolg daarvan het beheersen van de hysterese van de dubbele pneumatische pseudomuscle van Prandtl-Ishlinsky met behulp van het model”, Mechatronics, Vol. 28, blz. 35-45, 2015
- [21] SL Xie, HT Liu, JP Mei en GY Gu, “modellering en compensatie van asymmetrische hysterese als pneumatische kunstmatige spieren met behulp van een aangepast algemeen Prandtl-Ishlinsky-model”, Mechatronics, vol. 52, blz. 49-57, 2018
- [22] S. Song, SK Xie, Z. Zhou en Yu Hu, “Het modelleren van een absolute pneumatische faux-spier met behulp van een hybride kunstmatig sensorisch netwerk van computers”, Mechatronics, Vol. 28, blz. 124-131, jan. 2015
- [23] S. Arimoto, “Niet-lineaire regeltheorie gerelateerd aan mechanische systemen: een benadering gebaseerd op passiviteit en circuittheorie”, Clarendon Press Oxford, pp. 174-176, 1996.
- [24] RM Murray, Z. Lee, in verhoging tot S. Sastri, A Mathematical Introduction to Robot Manipulation, CRC Press, 94′. Website
Aanbevolen: Fortect
Bent u het beu dat uw computer traag werkt? Zit het vol met virussen en malware? Vrees niet, mijn vriend, want Fortect is hier om de dag te redden! Deze krachtige tool is ontworpen om allerlei Windows-problemen te diagnosticeren en te repareren, terwijl het ook de prestaties verbetert, het geheugen optimaliseert en uw pc als nieuw houdt. Wacht dus niet langer - download Fortect vandaag nog!

* Het is gewoon bedoeld met HTML5 plus CSS3 voor moderne browsers zoals Chrome, Firefox, Safari, Opera Edge ,.
Download deze software en repareer uw pc binnen enkele minuten.Unknown Capi Error Endnote
Nota Di Chiusura Errore Capi Sconosciuto
Nota Final De Error De Capi Desconocido
Okant Capi Fel Slutnot
Note De Fin D Erreur Capi Inconnue
Primechanie K Neizvestnoj Oshibke Capi
Nota Final De Erro Capi Desconhecido
알 수 없는 대문자 오류 미주
Unbekannter Capi Fehler Endnote
Nieznany Przypis Koncowy Bledu Capi




