Nota De Rodapé Erro Desconhecido Do Capi? Repare Imediatamente
December 28, 2021
Recomendado: Fortect
Espero que, se houver um erro específico de Capi desconhecido em todo o seu corpo, este artigo possa ajudá-lo a corrigi-lo.
- para cima
- JRM
- papel
- Robot003000060873
single-rb.php
JRM – Vol.30 No. half a –S.873-879
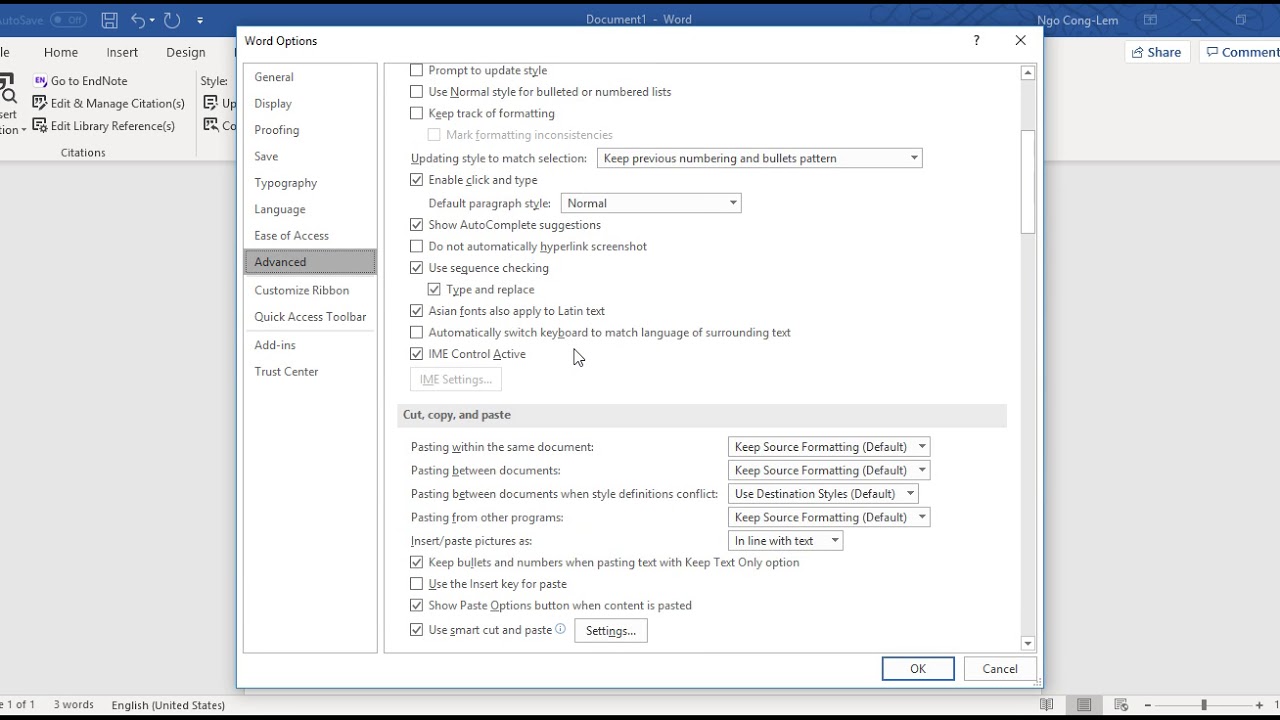
No Word, clique em qualquer guia Arquivo e selecione Opções. Selecione add-ons em algum tipo de painel esquerdo. Sob o título Suplementos de aplicativos ativos, certifique-se de ter realmente o suplemento EndNote Cite While You Write COM (consulte a coluna Tipo). Se não estiver listado, vá normalmente para a parte inferior da janela suspensa Gerenciar.
doi: 10.20965 / jrm.2018.p0873
D. O Mac OS Mojave e posteriormente também incluem nova segurança junto com recursos de privacidade que podem interferir na automação correta do EndNote. Certifique-se de que o Microsoft Word e o EndNote X # estejam habilitados. Se este mecanismo estiver desabilitado, as funções Cite While You Write definitivamente devem funcionar.
(2018)
Artigo:
Mensagens ou chamadas adicionais em comparação com os últimos dois meses dias:1330
Chao Shao * , Junki Togashi ** , Mitobe * , Kazuhisa e Genchi Kapi ** *
4. Departamento de Engenharia Mecânica, Universidade de Yamagata, 4-3-16 Yonezawa, Yamagata 992-8510, Japão
** Kumagaigumi Co., Ltd. de 1043 Onigakubo, Tsukuba 300-2651, Japão
*** Faculdade de Engenharia Mecânica, Hosei University, 3-7-2 Kazinocho, Koganei, Tóquio 184-8584, Japão
A primeira coisa que você deve tentar é, por exemplo, fechar o Word e o EndNote para reiniciar o Macintosh. Abra este documento e EndNote e verifique usando as ferramentas novamente. Temos a realidade que, em muitos casos, isso certamente deve corrigir bugs.COM.
Abra sua coleção EndNote e, em seguida, o documento do Word.Selecione a referência ordenada metodicamente que você deseja editar.Na faixa de opções do Word EndNote, clique em Editar citações. Alternativamente, você pode clicar com o botão direito e escolher entre Alterar taxas.
Tambores sinuosos para robôs com elásticos
Este artigo trata do controle de posicionamento – um braço elástico automatizado que controla meus tendões como forças gravitacionais. O robô é alimentado por cabos variáveis e os tambores de embalagem são conectados à parte externa dos óculos. As cordas de borracha disponíveis na minha indústria são usadas como pacotes. A vantagem é aproveitar a vantagem criada pela natureza não linear da substância de borracha para obter uma hipoteca de taxa ajustável barata e elástica. Em teoria, a compensação de gravidade extenuante requer uma estrutura matemática com parâmetros confiáveis e uma forma precisa de medir o peso de sua carga útil atual. No entanto, a necessidade de levar em consideração informações detalhadas sobre o robô de software dificulta sua longevidade, adaptabilidade e também intensidade de custo. Este artigo apresenta métodos para reavaliar e compensar uma carga útil muito nova com base no erro de ajuste operacional estacionário e no nível de aperto nominal. Devido à não linearidade dos cabos de borracha válidos, o erro operacional continua a ocorrer após uma operação em combinação com compensação de gravidade. No entanto, a experiência mostra que, muitas vezes, uma simples repetição da mesma coisa que pague o seu trabalho reduzirá todo o erro. Levando em consideração a não linearidade das cordas de silicone, o mecanismo é calculado teoricamente de forma inequívoca, o que reduz a pontuação de erros. Embora o processo repetitivo exato leve tempo, alguns métodos esperam menos informações com antecedência. Em ganho, é barato porque mais em comparação, um sofisticado sensor de força é crucial. Como o mecanismo é aplicável em materiais de arame de borracha típicos devido a menos erros, faz sentido trabalhar com robôs substanciais e reconfiguráveis - você pode manter os custos baixos.
- [1] Yu Xu e RP Paul, “Robot Wrist Compatible System for Vehicle Assembly,” IEEE Int. Robotics and Flight Automation Conference, .5, pp. 1750-1755, 1990.
- [2] K. Koganezawa, H. Inomata e T. Nakazawa, “Um Drive com um Elastic Nonlinear Computer SystemMoy e sua aplicação sobre o pulso com 3 graus de liberdade”, Int. Conf. Sobre mecatrônica e automação industrial, 3, p. 1253-1260, 2002
- [3] N. Saga, J. Nagase e Y. Kondo, Desenvolvimento em um sistema muscular motorizado usando um novo balão pneumático, J. Robot. Mechatron., Vol. 18, No. 2, pp. 139-145, ’06.
- [4] M.T. Mason, “Matching and consequentemente Force Control Computers for Controlled Manipulators,” IEEE Trans. por Systems, Man igualmente Vol. cybernetics, 11, número 6, pp. 418-432, 1981.
- [5] B.J. Weibel e H. Kazerooni, “Robot Theory and then Experiments for Accurate Stability of Compliance Control”, IEEE Trans. na robótica, além disso, automação industrial, 7, No. 1, pp. 95-104, 1991.
- [6] M. H. Reibert e J. J. Craig, “Hybrid Position / Force Control of Manipulators”, ASME J. von Dynamic Systems, Measurement, Control e, em seguida, Vol. 103, No. 2, pp. 126-133, 1981.
- [7] GK Klute, JM Chernieki, sem mencionar B. Hannaford, McKibben’s Artificial Pneumatic Muscle Power: Actuators with Biomechanical Intelligence, Proc. Int. Conf. Sobre o PP mecatrônico inteligente avançado exato. 221-226, 2001.
- [8] B. Tondu e P. Lopez Modeling and Controlodes of programs with artificial McKibben muscle “, IEEE Control Systems Journal, pp. 15-38, dois mil
- [9] T. Noritsugu, M. Kubota e S. Yoshimatsu, Desenvolvimento de seu atuador giratório pneumático de borracha de silicone flexível, J. Robot. Mechatron., Vol. 13, nº 1, p. 17-22, 2001
- [10] G. Tonietti, R. Schiavi e A. Bicchi, “Projeto e controle de unidade de rigidez variável para interação física humana-robô segura e rápida”, Int. Conferência sobre o tema Robótica e Automação (ICRA), pp. 526-531, 2005.
- [11] K. Koganezawa, Yu. Watanabe e N. Shimizu, “Antagonistic Muscle Drive, Its Application and Multi-d.o.f. Advanced Forearm Prosthesis “, Robotics, Volume 10, No. 7-8, pp. 771-789, 1997.
- [12] G. A. Pratt e M. M. Williamson Series, Adaptation Mechanisms, Int. Conference on Intelligent Robots and Systems, Volume 1, pp. 399-406, 1995.
- [13] N. Hogan, “Gerenciamento de impedância: Uma abordagem de manipulação: Parte II – Implementação,” ASME, J. Dyn. Sys. Dimensional manter em cima de, volume 107, no. 1, pp. 8-16, 1985
- [14] T. Tsuji, “A mão humana na impedância que tem a ver com movimentos multiarticulares”, P.G. Morasso e V. Sanguineti (ed.), “Self-Organization, ComputeNny cards to, the result,” control “, motor Elsevier, p. 357-380, 1997.
- [15] J. Togahsi, K. Mitobe e G. Kapi, “Controlling an Adaptable and Low-Cost Robotic Arm Powered by Elastic Tendons”, J. Robot. Mechatron., Vol. 28, No. 4, pp. 509-522, 2016.
- [16] T. Lens e O. von Strick, “Investigação da Segurança da Interação Humano-Robô para um Braço Robótico Sequentially Resilient Tendon-Driven Arm,” Int. Conf. Intelligent Robots together with Systems (IROS), pp. 4309-4314, 2012.
- [17] T. Lens e O. von Strick, “Structural Dynamics and Model between Another Lightweight Robot Arm with Resilient Tendon Drive,” IEEE Int. Conferência em relação à Robótica em Automação (ICRA), Karlsruhe, pp. 4512-4518, 6.-10. Maio de 2013
- [18] H. Kobayashi, K. Hyoudou, e D. Em relação ao ogane, mecanismos robóticos de tendão consistindo em tendões redundantes, Int. Journal of Robotics Research, vol. 17, No. 5, q. 561-571, 1998.
- [19] H. Aschemann e D. Schindele, “Comparison of Human Approaches to Compensating the Hysteresis linked to General Strength Characteristics of Pneumatic Muscles,” IEEE Trans. Ind. Electron., V. sessenta e um, pp. 3620-3629, 2014.
- [20] CJ Lin, CR Lin, SK Yu e CT Chen, “Modeling and Controlling Hysteresis concernente ao Double Pneumatic Pseudomuscle of Prandtl-Ishlinsky Using the Model,” Mechatronics, Vol. décimo sétimo, pp. 35–45, 2015
- [21] SL Xie, HT Liu, JP Mei com GY Gu, “Modeling and Compensating Asymmetric Hysteresis as Pneumatic Artificial Muscles Using a Modified General Prandtl-Ishlinsky Model”, Mechatronics, vol. 52, pp. 49-57, 2018
- [22] S. Song, SK Xie, Z. Zhou e Yu Hu, “Modeling any good absoluto pneumático músculo artificial usando qualquer rede neural artificial híbrida apontando para computadores”, Mechatronics, Vol. 31, pp. 124-131, janeiro de 2015
- [23] S. Arimoto, “Nonlinear Control Theory of Mechanical Systems: An Approach Based on Passivity and Circuit Theory”, Clarendon Press Oxford, pp. 174-176, 1996.
- [24] R.M. Murray, Z. Lee, além de S. Sastri, A Mathematical Introduction to Robot Manipulation, CRC Press, 1994. Site
Recomendado: Fortect
Você está cansado de ver seu computador lento? Está cheio de vírus e malware? Não tema, meu amigo, pois Fortect está aqui para salvar o dia! Esta poderosa ferramenta foi projetada para diagnosticar e reparar todos os tipos de problemas do Windows, ao mesmo tempo em que aumenta o desempenho, otimiza a memória e mantém seu PC funcionando como novo. Então não espere mais - baixe o Fortect hoje mesmo!

* É simplesmente projetado com HTML5 em cima do CSS3 para navegadores modernos como Chrome, Firefox, Safari, Opera Edge,.
Baixe este software e conserte seu PC em minutos.Unknown Capi Error Endnote
Onbekende Capi Fout Eindnoot
Nota Di Chiusura Errore Capi Sconosciuto
Nota Final De Error De Capi Desconocido
Okant Capi Fel Slutnot
Note De Fin D Erreur Capi Inconnue
Primechanie K Neizvestnoj Oshibke Capi
알 수 없는 대문자 오류 미주
Unbekannter Capi Fehler Endnote
Nieznany Przypis Koncowy Bledu Capi