
Errore Capi Sconosciuto Della Nota A Piè Di Pagina? Ripara Subito
December 28, 2021
Consigliato: Fortect
Spero che se esiste davvero un errore Capi sconosciuto su un sistema, questo articolo può aiutare chiunque a risolverlo.
- spostandosi verso l’alto
- JRM
- carta
- Robot003000060873
single-rb.php
JRM – Vol.30 No. 6 –S.873-879
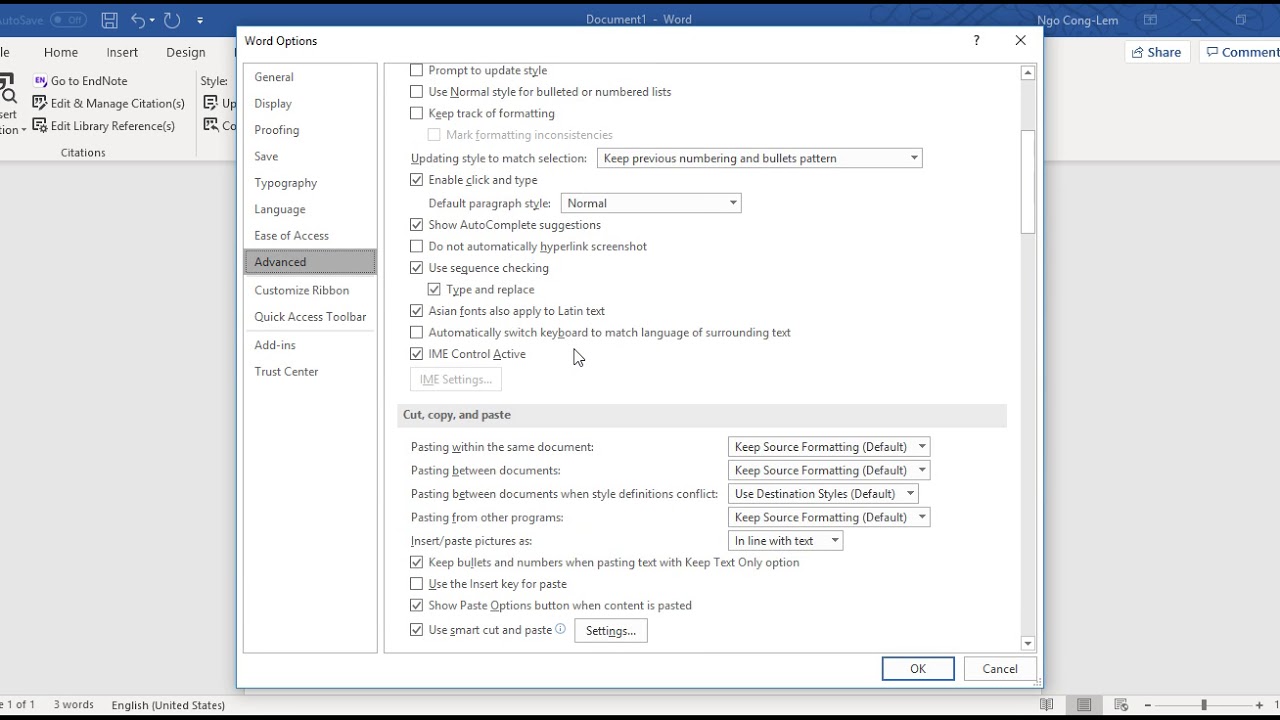
In Word, fai clic su un caso di file e seleziona Opzioni. Seleziona i componenti aggiuntivi nel riquadro di sinistra. Sotto il titolo Componenti aggiuntivi attivi dell’applicazione, assicurati che la persona disponga del componente aggiuntivo EndNote Cite While You Write COM (vedi colonna Tipo). Se non è elencato, vai ad aiutarti nella parte inferiore della finestra a discesa Gestisci.
doi: 10.20965 / jrm.2018.p0873
D. Mac OS Mojave e versioni successive includono anche nuove funzionalità di stock e privacy che potrebbero ostacolare la corretta automazione di EndNote. Assicurati che Microsoft Word ed EndNote X # siano abilitati. Se una certa automazione è disabilitata, le funzioni Cite While You Write non dovrebbero necessariamente funzionare.
(2018)
Carta:
Chiamate aggiuntive rispetto agli ultimi 75 giorni:1330
Chao Shao ( vuoto ) , Junki Togashi ** , Mitobe * , Kazuhisa e Genchi Kapi ***
** Kumagaigumi Co., Ltd. de 1043 Onigakubo, Tsukuba 300-2651, Giappone
*** Facoltà di Ingegneria Meccanica, Università Hosei, 3-7-2 Kazinocho, Koganei, Tokyo 184-8584, Giappone
La prima cosa che dovresti provare è senza dubbio, ad esempio, chiudere Word ed EndNote insieme al riavvio del tuo Macintosh. Apri questo documento, EndNote e , prova a utilizzare nuovamente gli strumenti. Ci siamo resi conto che in molti casi risolverà sicuramente bugs.COM.
Apri il tuo recupero crediti EndNote e il documento Word.Seleziona il preventivo metodicamente prescritto che desideri modificare.Sulla maggior parte della barra multifunzione di Word EndNote, fare clic su Modifica preventivo (s). In alternativa, puoi fare clic con il pulsante destro del mouse per non parlare di selezionare Modifica tariffe.
Avvolgitori per bot con elastici
Questo articolo riguarda generalmente il controllo del posizionamento: un braccio robotico elastico che controlla i miei tendini desiderano la gravità. Il robot è alimentato da cavi elastici e tamburi di imballaggio forse possono essere fissati all’esterno degli stessi telai. Le funi di gomma disponibili all’interno dell’industria vengono utilizzate come programmi. Il vantaggio è quello di avvalersi della natura non lineare dei materiali gommati per ottenere un mutuo a tasso variabile poco costoso e quindi flessibile. In linea di principio, l’intensa compensazione della gravità richiede un modello preciso con parametri affidabili e la misurazione più adatta del peso del particolare carico utile. Tuttavia, la necessità di prendere in considerazione informazioni dettagliate sul robot di una persona rende difficile la sua effettiva versatilità, adattabilità e efficacia del livello di prezzo. Questo articolo presenta metodi per rivalutare e compensare un carico utile sorprendente basato sull’errore di posizione di funzionamento stazionario e sul fattore di contrazione nominale. A causa della non linearità dei cavi in vera gomma collegati, l’errore chirurgico persiste dopo un’operazione in fusione con la compensazione della gravità. Tuttavia, sperimenta attività che una semplice ripetizione di questi stessi pagamenti ridurranno l’errore specifico. Tenendo conto dell’effettiva non linearità delle corde in silicone, si ritiene che il meccanismo venga analizzato teoricamente in modo univoco, il che riduce un particolare numero di errori. Mentre il vero processo iterativo richiede tempo, alcune idee richiedono meno informazioni in anticipo. Inoltre, è poco costoso in quanto è senza dubbio necessario un po’ più di un sofisticato sensore di forza. Poiché il meccanismo è adatto ai tipici materiali in filo di gomma, in grado di ridurre gli errori, è necessario lavorare con robot forex sostanziali e riconfigurabili per contenere i costi.
- [1] Yu Xu e RP Paul, “Sistema robot compatibile con polso per assemblaggio di veicoli”, IEEE Int. Conferenza sulla robotica e l’automazione del volo, .3, pp. 1750-1755, 1990.
- [2] K. Koganezawa, H. Inomata e T. Nakazawa, “Un’unità con un sistema informatico elastico non lineare Moy e il suo pacchetto al polso con 3 gradi di libertà universitari”, int. conf. A proposito di meccatronica e automazione industriale, 3, v. 1253-1260, 2005
- [3] N. Saga, J. Nagase e Y. Kondo, Sviluppo di un sistema muscolare motorizzato funzionante con un pallone pneumatico, J. Robot. Meccatron., vol. 18, n. 2, pp. 139-145, 2006.
- [4] M.T. Mason, “Computer di abbinamento e controllo della forza per manipolatori controllati”, IEEE Trans. di Systems, Man anche Vol. cibernetica, 11, emettere buone ragioni, pp. 418-432, 1981.
- [5] B.J. Weibel e H. Kazerooni, “Robot Theory and Experiments for Accurate Stability between Compliance Control”, IEEE Trans. in robotica e automazione industriale, 7, n. un particolare, pp. 95-104, 1991.
- [6] M. H. Reibert e J. J. Craig, “Hybrid Position / Force Control relative to Manipulators”, ASME J. von Dynamic Systems, Measurement, Control, e poi vol. 103, n. 2, pp. 126-133, ’81.
- [7] GK Klute, JM Chernieki, per non parlare di B. Hannaford, Artificial Pneumatic Muscle Power di McKibben: Attuatori combinati con l’intelligenza biomeccanica, Proc. interno conf. Informazioni sulla meccatronica intelligente avanzata PP. 221-226, 1999.
- [8] B. Tondu e P. Lopez Modeling and Controlodes collegati a robot con muscoli McKibben artificiali rrn., IEEE Control Systems Journal, pp. 15–38, 2002
- [9] T. Noritsugu, M. Kubota e S. Yoshimatsu, Sviluppo di un attuatore pneumatico di rotazione flessibile in gomma siliconica, J. Robot. Meccatron., vol. 13, n. 1, p. 17-22, fine 2001
- [10] G. Tonietti, R. Schiavi A. Bicchi, “Progettazione e controllo insieme a unità di rigidità variabile per un’interazione fisica uomo-robot sicura e veloce”, int. Conferenza su Robotica e Automazione (ICRA), pp. 526-531, 2005.
- [11] K. Koganezawa, Yu. Watanabe e N. Shimizu, “Antagonistic Muscle Drive, its Application and Multi-d.o.f. Protesi avanzata dell’avambraccio”, Robotica, Volume 12, n. 7-8, pp. 771-789, ’97.
- [12] G. A. Pratt ma M. M. Williamson Series, Adaptation Mechanisms, Int. Conferenza sui robot intelligenti e inoltre sui sistemi, Volume 1, pp. 399-406, 1998.
- [13] N. Hogan, “Gestione dell’impedenza: un approccio alla manipolazione: parte II – Attuazione”, ASME, J. Dyn. Sis. Controllo dimensionale, volume 107, n. 1, pp. 8-16, 1985
- [14] T. Tsuji, “La mano umana nella maggior parte dell’impedenza dei movimenti multi-articolari”, P.G. Morasso e inoltre V. Sanguineti (a cura di), “Auto-organizzazione, carica ComputeNny e, di conseguenza, “controllo”, generatore magnetico Elsevier, p. 357-380, 1997.
- [15] J. Togahsi, K. Mitobe e G. Kapi, “Controllo di un braccio robotico adattabile ea basso costo alimentato da tendini elastici”, J. Robot. Meccatron., vol. 28, n. 4, pp. 509-522, 2016.
- [16] T. Lens e O. von Strick, “Indagine sulla sicurezza dell’interazione uomo-robot per un braccio robotico guidato da tendini a resilienza sequenziale”, int. conf. Robot e sistemi intelligenti (IROS), pp. 4309-4314, il prossimo anno.
- [17] T. Lens e O. von Strick, “Dinamica strutturale e modello di un altro braccio robotico leggero con trasmissione tendinea resiliente”, IEEE Int. Conferenza sulla robotica nell’automazione (ICRA), Karlsruhe, pp. 4512-4518, 6.-10. Maggio l’anno 2013
- [18] H. Kobayashi, K. Hyoudou, e di conseguenza D. A proposito di ogane, accessori tendinei robotici con tendini ridondanti, Int. Giornale coinvolto nella ricerca sulla robotica, vol. 17, n. semplice, p. 561-571, 1998.
- [19] H. Aschemann e D. Schindele, “Confronto sugli approcci umani alla compensazione dell’isteresi delle caratteristiche generali di forza dei muscoli pneumatici”, IEEE Trans. Ind. Electron., V. 61, pp. 3620-3629, 2014.
- [20] CJ Lin, CR Lin,SK Yu inoltre CT Chen, “Modelling and Controlling Hysteresis of the Double Pneumatic Pseudomuscle relative to Prandtl-Ishlinsky Using the Model”, Mechatronics, vol. 28, pp. 35–45, 2015
- [21] SL Xie, HT Liu, JP Mei e GY Gu, “Modellazione e compensazione dell’isteresi asimmetrica come muscoli artificiali pneumatici utilizzando un modello generale di Prandtl-Ishlinsky modificato”, Meccatronica, vol. 52, pp. 49-57, 2018
- [22] S. Song, SK Xie, Z. Zhou e Yu Hu, “Modellazione di un muscolo artificiale pneumatico assoluto che guida una rete neurale artificiale ibrida creata da computer”, Mechatronics, vol. 31, pp. 124-131, gennaio 2015
- [23] S. Arimoto, “Teoria del controllo non lineare dei sistemi meccanici: un approccio basato sulla passività e inoltre sulla teoria dei circuiti”, Clarendon Press Oxford, pp. 174-176, 1996.
- [24] R.M. Murray, Z. Lee, oltre a S. Sastri, A Mathematical Introduction to Robot Manipulation, CRC Press, 1994. Sito web
Consigliato: Fortect
Sei stanco del fatto che il tuo computer funzioni lentamente? È pieno di virus e malware? Non temere, amico mio, perché il Fortect è qui per salvare la situazione! Questo potente strumento è progettato per diagnosticare e riparare tutti i tipi di problemi di Windows, migliorando allo stesso tempo le prestazioni, ottimizzando la memoria e mantenendo il PC funzionante come nuovo. Quindi non aspettare oltre: scarica Fortect oggi!

Unknown Capi Error Endnote
Onbekende Capi Fout Eindnoot
Nota Final De Error De Capi Desconocido
Okant Capi Fel Slutnot
Note De Fin D Erreur Capi Inconnue
Primechanie K Neizvestnoj Oshibke Capi
Nota Final De Erro Capi Desconhecido
알 수 없는 대문자 오류 미주
Unbekannter Capi Fehler Endnote
Nieznany Przypis Koncowy Bledu Capi

Related posts:
 Vari Modi Per Correggere Gli Errori Quando Si Chiama Il Client_sharedlib Di Destinazione Ins_rdbms.mk Impossibile Trovare L’opzione Per Il Problema Di XP Device Manager
Vari Modi Per Correggere Gli Errori Quando Si Chiama Il Client_sharedlib Di Destinazione Ins_rdbms.mk Impossibile Trovare L’opzione Per Il Problema Di XP Device Manager  Varie Strade Per Correggere L’errore DVD Jvc
Varie Strade Per Correggere L’errore DVD Jvc  Facile Strada Per Correggere L’errore 1022 Dell’apparecchiatura HP Apre Lo Sportello Del Contenitore Mancante
Facile Strada Per Correggere L’errore 1022 Dell’apparecchiatura HP Apre Lo Sportello Del Contenitore Mancante