недиагностированная ошибка Capi в сноске? Немедленно отремонтируйте
December 28, 2021
Рекомендуется: Fortect
Надеюсь, что если на вашей подиуме обнаружится неизвестная ошибка Capi, эта статья поможет вам в этом.
- вверх
- JRM
- бумага
- Робот003000060873
<раздел>
single-rb.php
JRM – Vol.30 No. 6 –S.873-879
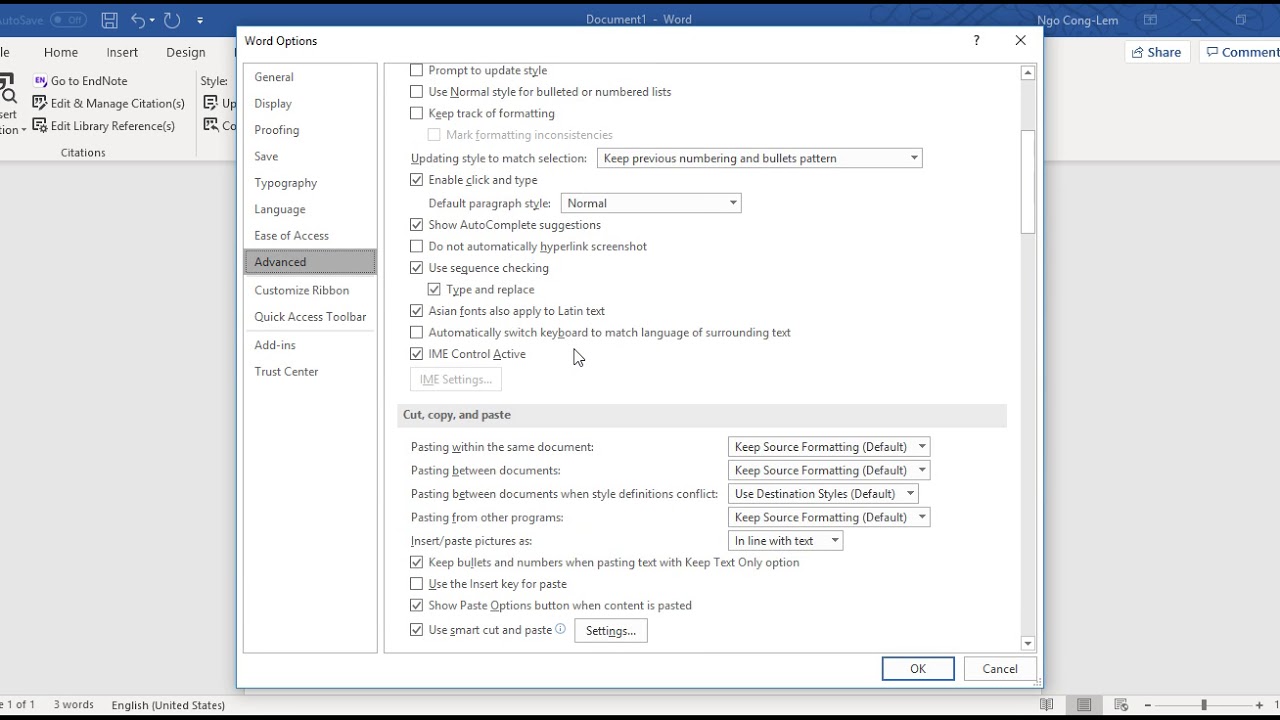
В Word щелкните любую вкладку «Файл» и выберите «Параметры». Выберите надстройки на самой левой панели. Под заголовком «Активные надстройки приложений» убедитесь, что вы купили надстройку EndNote Cite при написании COM (см. Столбец «Тип»). Если его нет в списке, перейдите в нижнюю часть раскрывающегося окна «Управление».
doi: 10.20965 / jrm.2018.p0873
Д. Mac OS Mojave и, следовательно, более поздние версии, также включают новые функции безопасности и конфиденциальности, которые могут помешать правильной автоматизации EndNote. Убедитесь, что Microsoft Word и EndNote X # включены. Если это программное обеспечение отключено, функции Cite While You Write определенно не должны работать.
(2018)
<раздел>
Бумага:
Дополнительные определения по сравнению с последним 61 днем:1330
Чао Шао * , Джунки Тогаши ** , Митобе * , Кадзухиса и Генчи Капи ** *
4. Кафедра машиностроения, Университет Ямагата, 4-3-16 Йонезава, Ямагата 992-8510, Япония
** Kumagaigumi Co., Ltd. de 1043 Onigakubo, Tsukuba 300-2651, Japan
*** Факультет машиностроения, Университет Хосэй, 3-7-2 Казиночо, Коганей, Токио 184-8584, Япония
Прежде всего, вы должны попробовать, например, закрыть Word и EndNote вместе с перезапуском Macintosh. Откройте этот документ и EndNote и еще раз взгляните на использование инструментов. Мы пришли к выводу, что во многих случаях это определенно исправит bugs.COM.
Откройте свою коллекцию EndNote, а также документ Word.Выберите методично упорядоченное предложение, которое вы хотите отредактировать.На ленте Word EndNote щелкните Изменить цитаты. Кроме того, вы можете щелкнуть правой кнопкой мыши и выбрать изменение ставок.
Намотка барабанов для роботов достаточная причина для резинки
Эта статья посвящена управлению позиционированием – эластичной автоматической руке, которая контролирует мои сухожилия, как тяжесть. Робот питается от универсальных кабелей, а упаковочные барабаны прикреплены к внешней стороне рамы. Резиновые канаты, доступные во всех отраслях промышленности, используются в виде пучков. Преимущество состоит в том, чтобы воспользоваться преимуществом большей части нелинейного характера информации о резине для получения недорогой ипостоянной ипотечной ссуды с регулируемой процентной ставкой. Теоретически, компенсация напряженной гравитации требует математической версии с надежными параметрами и точным объемом веса вашего семейного груза. Однако необходимость принимать во внимание подробную информацию о торговой программе затрудняет ее эластичность, адаптивность, а также затратность. В этой статье представлены методы переоценки и компенсации другой полезной нагрузки на основе ошибки стационарного рабочего позиционирования и номинального ингредиента затяжки. Из-за нелинейности оригинальных резиновых кабелей, эксплуатационная ошибка не была устранена после одной операции в сочетании с компенсацией силы тяжести. Однако опыт показывает, что, к сожалению, простое повторение соответствующей оплаты труда уменьшит ошибку человека. С учетом нелинейности, связанной с силиконовыми струнами, механизм экранирован теоретически однозначно, что уменьшает диапазон ошибок. Хотя точный повторяющийся процесс требует времени, некоторые методы требуют меньше информации заранее. Что касается подсчета, то он недорогой, поскольку для этого потребуется больше, чем сложный датчик силы. Поскольку механизм применим и используются типичные резиновые проволочные материалы, из-за которых будет меньше ошибок, имеет смысл работать с существенными, реконфигурируемыми роботами, чтобы снизить затраты.
- [1] Юй Сюй и Р.П. Пол, «Роботизированная система, совместимая с запястьем для сборки транспортных средств», IEEE Int. Конференция по робототехнике и автоматизации полетов, 10, стр. 1750-1755, 1990.
- [2] К. Коганезава, Х. Иномата и Т. Накадзава, «Привод с упругой нелинейной компьютерной системойMoy и его применение для запястья с 3 степенями свободы», Int. Конф. О мехатронике и промышленной автоматизации, 3, с. 1253-1260, 2005 г.
- [3] Н. Сага, Дж. Нагасе и Ю. Кондо, Развитие моторизованной мышечной системы с использованием любого типа пневматического шара, J. Robot. Mechatron., Vol. 18, No. 2, pp. 139–145, июнь 2006 г.
- [4] М.Т. Мейсон, «Соответствие компьютеров с контролем силы для управляемых манипуляторов», IEEE Trans. компании Systems, Man равно Vol. кибернетика, 11, вып. 6, стр. 418-432, 1981.
- [5] Б.Дж. Вейбель и Х. Казеруни, «Теория роботов и эксперименты для точной стабильности контроля соответствия», IEEE Trans. по робототехнике, а также промышленной автоматизации, 7, № 1, стр. 95-104, 1991.
- [6] М. Х. Райберт и Дж. Дж. Крейг, «Гибридное управление положением / усилием манипуляторов», ASME J. von Dynamic Systems, Measurement, Control, а затем Vol. 103, No. 2, pp. 126–133, 1981.
- [7] Г.К. Клют, Дж. М. Черниеки, совсем не то, чтобы упомянуть Б. Ханнафорда, «Искусственная пневматическая мышечная сила МакКиббена: приводы с биомеханическим интеллектом», Proc. Int. Конф. Обо всем передовом интеллектуальном мехатронике PP. 221-226, конец 90-х гг.
- [8] Б. Тонду и П. Лопес «Моделирование и контрольные коды программ автоматической торговли с искусственными мышцами Маккиббена», IEEE Control Systems Journal, стр. 15–38, 2100.
- [9] Т. Норицугу, М. Кубота и С. Йошимацу, Разработка отличного гибкого пневматического поворотного привода из силиконовой резины, J. Robot. Mechatron., Vol. 13, № 1, с. 17–22, 2001 г.
- [10] Г. Тониетти, Р. Скьяви и А. Бикки, «Проектирование и управление приводом переменной жесткости для безопасного и быстрого физического взаимодействия человека и робота», Int. Конференция по робототехнике и автоматизации (ICRA), стр. 526-531, 2005 г.
- [11] К. Коганезава, Ю. Ватанабэ и Н. Симидзу, «Антагонистический мышечный драйв, его применение и мульти-d.o.f. Продвинутый протез предплечья », Робототехника, Том 12, № 7-8, стр. 771-789, 1997.
- [12] G. A. Pratt, M. M. Williamson Series, Adaptation Mechanisms, Int. Конференция по интеллектуальным роботам и системам, том 1, стр. 399-406, 1995 г.
- [13] Н. Хоган, «Управление импедансом: подход манипуляции: Часть II – Внедрение», ASME, J. Dyn. Sys. Устранение габаритных размеров, том 107, вып. 1. С. 8–16, 85.
- [14] Т. Цудзи, «Человеческая рука в импедансе наряду с многосуставными движениями», П.Г. Морассо и В. Сангинети (ред.), «Самоорганизация, ComputeNny карты, а также, как следствие,« контроль », двигатель Elsevier, стр. 357–380, 1997.
- [15] Дж. Тогахси, К. Митобе и Г. Капи, «Управление адаптируемой и недорогой роботизированной рукой, приводимой в действие эластичными сухожилиями», J. Robot. Mechatron., Vol. 28, No. 9, pp. 509-522, 2016.
- [16] Т. Линс и О. фон Стрик, «Исследование безопасности взаимодействия человека и робота для последовательно устойчивой роботизированной руки, управляемой сухожилиями», Int. Конф. Интеллектуальные роботы и системы (IROS), стр. 4309-4314, 2012 г.
- [17] Т. Ленс и О. фон Стрик, «Структурная динамика и модель, наиболее часто ассоциируемая с другой легкой рукой робота с упругим приводом сухожилий», IEEE Int. Конференция по робототехнике в автоматизации (ICRA), Карлсруэ, стр. 4512-4518, 6.–10. Май 2013 г.
- [18] Х. Кобаяши, К. Хёдо и Д. Относительно огане, роботизированных механизмов сухожилий, содержащих избыточные сухожилия, Int. Журнал исследований робототехники, Vol. 17, №5, л. 561-571, 1998.
- [19] Х. Ашеманн и Д. Шинделе, «Сравнение человеческих подходов к компенсации гистерезиса, связанных с общими силовыми характеристиками пневматических мышц», IEEE Trans. Ind. Electron., V. sixty one, pp. 3620-3629, 2014.
- [20] CJ Lin, CR Lin, SK Yu и CT Chen, «Моделирование и управление гистерезисом, аналогичным двойной пневматической псевдомышке Прандтля-Ишлинского, с использованием модели», Mechatronics, Vol. 27, стр. 35–45, 2015 г.
- [21] SL Xie, HT Liu, JP Mei, а затем GY Gu, «Моделирование и компенсация асимметричного гистерезиса как пневматические искусственные мышцы с использованием модифицированной общей модели Прандтля-Ишлинского», Mechatronics, vol. 52, стр. 49-57, 2018 г.
- [22] С. Сун, С. К. Се, З. Чжоу и Юй Ху, «Моделирование абсолютной пневматической искусственной мышцы с использованием каждой гибридной искусственной нейронной сети из компьютеров», Mechatronics, Vol. 31, стр. 124–131, январь 2015 г.
- [23] С. Аримото, «Нелинейная теория управления механическими системами: подход, основанный на пассивности и теории цепей», Clarendon Press Oxford, стр. 174-176, 1996.
- [24] Р.М. Мюррей, З. Ли, в дополнение к С. Састри, Математическое введение в манипуляции с роботами, CRC Press, 1994. Веб-сайт
Рекомендуется: Fortect
Вы устали от медленной работы компьютера? Он пронизан вирусами и вредоносными программами? Не бойся, друг мой, Fortect здесь, чтобы спасти положение! Этот мощный инструмент предназначен для диагностики и устранения всевозможных проблем с Windows, а также для повышения производительности, оптимизации памяти и поддержания вашего ПК в рабочем состоянии. Так что не ждите больше - скачайте Fortect сегодня!

* Он просто разработан с использованием HTML5 вместе с CSS3 для современных браузеров, таких как Chrome, Firefox, Safari, Opera Edge,.
Загрузите это программное обеспечение и почините свой компьютер за считанные минуты. г.Unknown Capi Error Endnote
Onbekende Capi Fout Eindnoot
Nota Di Chiusura Errore Capi Sconosciuto
Nota Final De Error De Capi Desconocido
Okant Capi Fel Slutnot
Note De Fin D Erreur Capi Inconnue
Nota Final De Erro Capi Desconhecido
알 수 없는 대문자 오류 미주
Unbekannter Capi Fehler Endnote
Nieznany Przypis Koncowy Bledu Capi
г.