Przypis Nieznany Błąd Capi? Napraw Natychmiast
December 29, 2021
Zalecane: Fortect
Mam nadzieję, że jeśli w systemie występuje nieznany błąd Capi, ten artykuł pomoże Ci go naprawić.
- w górę
- JRM
- papier
- Robot003000060873
pojedynczy-rb.php
JRM – Vol.30 nr 6 –S.873-879
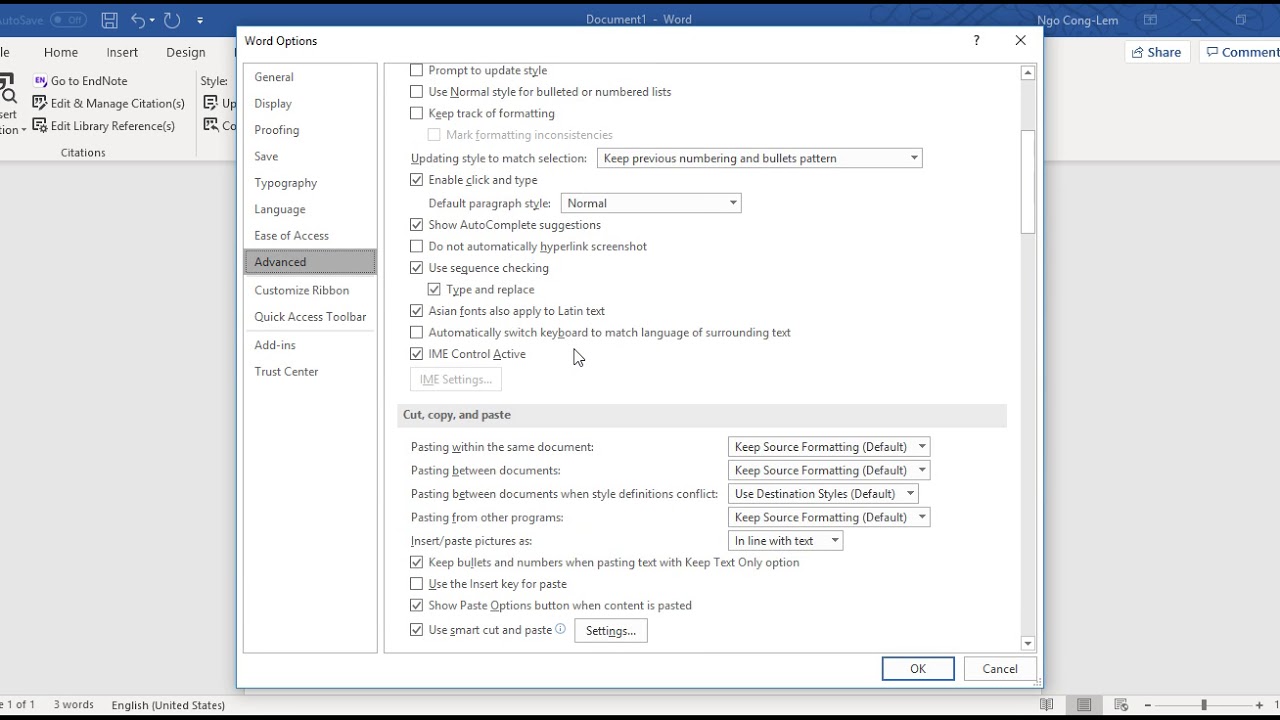
W programie Word kliknij dowolne karty plików i wybierz Opcje. Wybierz dodatki w lewym okienku. Upewnij się, że pod aktywnymi dodatkami aplikacji, Twoja witryna zawiera dodatek COM „Cytuj podczas pisania” programu EndNote (patrz kolumna Typ). Jeśli nie ma go na liście, przejdź na dół rozwijanego okna Zarządzaj.
doi: 10.20965 / jrm.2018.p0873
D. Mac OS Mojave i nowsze zawierają także nowe zasoby i funkcje prywatności, które mogą mieć wpływ na prawidłową automatyzację EndNote. Upewnij się, że Microsoft Word i EndNote X # są włączone. Jeśli automatyzacja jest wyłączona, funkcje Cytuj podczas pisania zdecydowanie nie powinny działać.
(2018)
Papier:
Dodatkowe połączenia w porównaniu do ostatnich 60 lat:1330
Chao Shao – , Junki Togashi ** , Mitobe * , Kazuhisa i Genchi Kapi ** *
Wydział Inżynierii Mechanicznej, Uniwersytet Yamagata, 4-3-16 Yonezawa, Yamagata 992-8510, Japonia
** Kumagaigumi Co., Ltd. de 1043 Onigakubo, Tsukuba 300-2651, Japonia
*** Wydział Inżynierii Mechanicznej, Uniwersytet Hosei, 3-7-2 Kazinocho, Koganei, Tokio 184-8584, Japonia
To, co powinieneś zazwyczaj wypróbować, to na przykład zamknięcie programu Word i EndNote w połączeniu z ponownym uruchomieniem komputera Macintosh. Otwórz ten dokument, a dodatkowo EndNote spróbuj ponownie użyć tych narzędzi. Zdaliśmy sobie sprawę, że w wielu przypadkach zrobienie tego z pewnością naprawi bugs.COM.
Otwórz sekwencję EndNote i dokument Word.Wybierz wymaganą metodycznie ofertę, którą chcesz edytować.Na tej wstążce programu Word EndNote kliknij pozycję Edytuj cytat(y). Możesz też kliknąć prawym przyciskiem myszy i wybrać opcję Zmień stawki.
Bębny nawijane do botów z gumkami
Ten artykuł dotyczy dosłownie kontroli pozycjonowania – zmiennego ramienia robota, które kontroluje moje ścięgna, które obejmują grawitację. Robot napędzany jest elastycznymi kablami, a bębny pakujące na pewno będą przymocowane na zewnątrz jego ram. Liny gumowe dostępne w branży są używane tak samo. Zaletą jest skorzystanie z nieliniowych materiałów z tworzyw sztucznych, aby uzyskać niedrogi i elastyczny kredyt hipoteczny o regulowanej stopie procentowej. Zasadniczo intensywna kompensacja grawitacyjna wymaga modelu geometrycznego o wiarygodnych parametrach i dokładnego pomiaru masy całego ładunku. Jednak konieczność uwzględniania szczegółowych informacji o każdym robocie utrudnia jego słuszną wszechstronność, adaptacyjność, a także efektywność kosztową. W tym artykule przedstawiono metody ponownej oceny i kompensacji gorącego ładunku w oparciu o błąd położenia stacjonarnego i nominalny współczynnik tonowania. Ze względu na nieliniowość najczęściej kojarzoną z prawdziwymi kablami gumowymi, błąd utrzymywania utrzymuje się po jednej operacji w połączeniu z kompensacją grawitacyjną. Jednak doświadczaj koncertów, na których proste powtórzenie tej samej zapłaty, którą wykonasz, zmniejszy twój obecny błąd. Biorąc pod uwagę każdą naszą nieliniowość strun silikonowych, mechanizm jest bez wątpienia analizowany teoretycznie jednoznacznie, co zmniejsza każdą liczbę błędów. Chociaż ten sam proces iteracyjny zajmuje trochę czasu, niektóre urządzenia wymagają z góry mniej informacji. Ponadto jest niedrogi, ponieważ jest lepszy niż zaawansowany czujnik siły. Ponieważ mechanizm jest idealny do typowych materiałów z drutu gumowego przy mniejszej liczbie błędów, logika współpracuje z rozbudowanymi, rekonfigurowalnymi systemami w celu obniżenia kosztów.
- [1] Yu Xu i RP Paul, „System kompatybilny z nadgarstkiem robota do montażu pojazdów”, IEEE Int. Konferencja Robotyki i Automatyki Lotu, .3, s. 1750-1755, 1990.
- [2] K. Koganezawa, H. Inomata i T. Nakazawa, „Dysk z elastycznym nieliniowym systemem komputerowym Moy i jego wniosek o pożyczkę na nadgarstku z 3 certyfikatami wolności ”, Int. Konf. O mechatronice i automatyce przemysłowej, 3, pour. 1253-1260, 2005
- [3] N. Saga, J. Nagase i Y. Kondo, Rozwój zmotoryzowanego układu mięśniowego za pomocą balonu pneumatycznego, J. Robot. Mechatron, tom. 18, nr 2, s. 139-145, 2006.
- [4] M.T. Mason, „Komputery dopasowujące i sterujące siłą do sterowanych manipulatorów”, IEEE Trans. przez Systems, Man także tom. cybernetyka, 11, numer 1, s. 418-432, 1981.
- [5] BJ Weibel i H. Kazerooni, „Teoria i eksperymenty robotów dla dokładnej stabilności wraz z kontrolą zgodności”, IEEE Trans. z siedzibą na robotyce i automatyce przemysłowej, 7, nr jeden, s. 95-104, 1991.
- [6] MH Reibert i J.J. Craig, „Hybrydowa kontrola położenia / siły w manipulatorach”, ASME J. von Dynamic Systems, Measurement, Control, a następnie Vol. 103, nr 2, s. 126-133, ’81.
- [7] GK Klute, JM Chernieki, nie wspominając o B. Hannaford, Sztuczna siła mięśni pneumatycznych McKibbena: Siłowniki wystarczający powód dla inteligencji biomechanicznej, Proc. wewn. Konf. O zaawansowanej inteligentnej mechatronice PP. 221-226, 1999.
- [8] B. Tondu i/lub P. Lopez Modeling and Controlodes połączone z robotami ze sztucznymi mięśniami McKibbena o szerokości cala, IEEE Control Systems Journal, s. 15–38, 2007
- [9] T. Noritsugu, M. Kubota i S. Yoshimatsu, Rozwój związany z elastycznym pneumatycznym siłownikiem obrotowym z gumy silikonowej, J. Robot. Mechatron, tom. pech, nr 1, s. 17-22, ’01
- [10] G. Tonietti, R. Schiavi iw rezultacie A. Bicchi, „Projektowanie i sterowanie połączonym napędem o zmiennej sztywności w celu zapewnienia bezpiecznej i szybkiej fizycznej interakcji człowiek-robot”, wł. Konferencja na temat robotyki i automatyzacji (ICRA), s. 526-531, 2005.
- [11] K. Koganezawa, Yu. Watanabe i N. Shimizu, „Antagonistyczny napęd mięśni, jego zastosowanie i multi-d.o.f. Zaawansowana proteza przedramienia”, Robotics, tom 12, nr 7-8, s. 771-789, późne lata dziewięćdziesiąte.
- [12] G. A. Pratt z M. M. Williamson Series, Adaptation Mechanisms, Int. Konferencja „Inteligentne roboty, ale także systemy”, tom 1, s. 399-406, ’95.
- [13] N. Hogan, „Zarządzanie impedancją: podejście manipulacyjne: część II – wdrożenie”, ASME, J. Dyn. Sys. Kontrola wymiarów, objętość 107, nr. 1, s. 8-16, 1985
- [14] T. Tsuji, „Ludzka ręka w każdej z naszych impedancji ruchów wielostawowych”, P.G. Morasso V. Sanguineti (red.), „Samoorganizacja, karty ComputeNny black-jack i w rezultacie „kontrola”, napędzają Elsevier, s. 357-380, 1997.
- [15] J. Togahsi, K. Mitobe i G. Kapi, „Kontrolowanie elastycznego i taniego ramienia robota zasilanego przez elastyczne ścięgna”, J. Robot. Mechatron, tom. 28, nr 4, s. 509-522, 2016.
- [16] T. Lens i O. von Strick, „Badanie bezpieczeństwa interakcji człowiek-robot dla sekwencyjnie odpornego ramienia robota napędzanego ścięgnami”, wł. Konf. Inteligentne Roboty i Systemy (IROS), s. 4309-4314, dalej.
- [17] T. Lens i O. von Strick, „Dynamika strukturalna i model innego lekkiego ramienia robota dzięki elastycznemu napędowi ścięgien”, IEEE Int. Konferencja na temat robotyki w automatyzacji (ICRA), Karlsruhe, s. 4512-4518, 6.-10. Maj 2013
- [18] H. Kobayashi, K. Hyoudou, ponadto D. Odnośnie oganu, części ścięgien robota ze zbędnymi ścięgnami, Int. Dziennik dotyczący Robotics Research, tom. 17, nr 10, s. 561-571, 1998.
- [19] H. Aschemann i D. Schindele, „Porównanie ludzkich podejść do kompensacji histerezy ogólnych cech wytrzymałościowych mięśni pneumatycznych”, IEEE Trans. Ind. Electron., V. 61, s. 3620-3629, 2014.
- [20] CJ Lin, CR Lin, SK Yu dodatkowo CT Chen, „Modelowanie i kontrolowanie histerezy podwójnego pneumatycznego mięśnia rzekomego na Prandtl-Ishlinsky przy użyciu modelu”, Mechatronics, tom. 28, s. 35-45, 2015
- [21] SL Xie, HT Liu, JP Mei i GY Gu, „Modelowanie i kompensacja histerezy asymetrycznej jako pneumatyczne sztuczne mięśnie przy użyciu zmodyfikowanego ogólnego modelu Prandtla-Ishlinsky’ego”, Mechatronika, tom. 52, s. 49-57, 2018
- [22] S. Song, SK Xie, Z. Zhou i Yu Hu, „Modelowanie całkowicie pneumatycznego sztucznego mięśnia wykorzystującego hybrydową sztuczną sieć neuronową związaną z komputerami”, Mechatronics, tom. 31, s. 124-131, styczeń 2015
- [23] S. Arimoto, „Nieliniowa teoria sterowania systemami mechanicznymi: podejście oparte na pasywności i teorii obwodów”, Clarendon Press Oxford, s. 174-176, 1996.
- [24] R.M. Murray, Z. Lee, oprócz S. Sastri, A Mathematical Introduction to Robot Manipulation, CRC Press, 1994. Strona internetowa
Zalecane: Fortect
Czy masz dość powolnego działania komputera? Czy jest pełen wirusów i złośliwego oprogramowania? Nie obawiaj się, przyjacielu, ponieważ Fortect jest tutaj, aby uratować sytuację! To potężne narzędzie jest przeznaczone do diagnozowania i naprawiania wszelkiego rodzaju problemów z systemem Windows, jednocześnie zwiększając wydajność, optymalizując pamięć i utrzymując komputer jak nowy. Więc nie czekaj dłużej — pobierz Fortect już dziś!

Jest po prostu zaprojektowany z HTML5 i CSS3 dla nowoczesnych przeglądarek takich jak Chrome, Firefox, Safari, Opera Edge.
Pobierz to oprogramowanie i napraw swój komputer w kilka minut.Unknown Capi Error Endnote
Onbekende Capi Fout Eindnoot
Nota Di Chiusura Errore Capi Sconosciuto
Nota Final De Error De Capi Desconocido
Okant Capi Fel Slutnot
Note De Fin D Erreur Capi Inconnue
Primechanie K Neizvestnoj Oshibke Capi
Nota Final De Erro Capi Desconhecido
알 수 없는 대문자 오류 미주
Unbekannter Capi Fehler Endnote